地中飛行機研究会総合報告
2000.6
総括責任者 ながれ研究集団 佐藤 浩
0.はしがき
もっと速く走りたい、もっと早く目的地に着きたい、というのは人間の本能的な欲望です。その欲望につき動かされて、次々に移動手段が開発されました。馬に乗って走るという素朴なものから、自転車、汽車、自動車、飛行機と速度は飛躍的に増大しました。そして到達したのが”東京、大阪1時間 ”という要求です。
この2大都市は現在新幹線で2時間半で結ばれています。これは往復で5時間で、ビジネスが2時間とすると、出張は1日仕事となります。もし片道が1時間に短縮されると、出張は半日で済むことになります。これは大きな差です。
両都市の直線距離はほぼ500 kmですから、必要なスピ−ドは時速600 kmとなります。このスピ−ドに挑戦できるのは現在のところ、飛行機、新幹線、磁気浮上列車の3つです。それらについて検討を加えましょう。
A 旅客飛行機の弱点
飛行機は速いのですが、離着陸のために広大な空港が必要で、それは都心の近くには作れません。近距離の飛行では飛行時間よりも、空港と都心との交通の方に時間がかかります。それに荷物の検査などで搭乗手続きも煩雑です。空港へ行くのに1時間かかるとなると、東京−大阪1時間計画には飛行機は問題外になります。
このほかにも飛行はしばしば天候に左右されて運行が乱れます。運航中止によって旅行計画が台無しになる被害が頻発します。しかも飛行機はしばしば墜落事故を起こします。飛行機は100 % 安全とは言い難いのです。これらの欠点は決して技術が未熟だからではありません。これらは航空技術が将来いかに発達しても克服できない種類のものです。
B 新幹線の問題点
新幹線のスピ−ドアップの試みは盛んですが、現在の東海道新幹線では線路床の不安定が指摘されていますし、周辺への騒音や振動の影響を抑えることが困難で、実際の営業運転は時速 350 kmを越えることはできないと思われます。その上、高速化に伴う莫大なエネルギ−消費の問題があります。それは列車というものが完全には流線型にはできず、地面に付着して走るという制限のために空気抗力をある値以下にはできないからです。
C 磁気浮上列車の実現性
夢の技術として期待される磁気浮上列車は開発が遅れています。用地取得の難かしさもさることながら、技術的にも難しい問題が多いのです。例えば磁場が急に消滅する可能性があり、天候としても、雨や雪、横風、地震の影響などがまだはっきりとは分かりません。また強い磁場が人の健康に障害を与えないか、という疑問があります。元気な人には何でもなくても、特別な体質の人には大きな影響があるかも知れません。たとえテスト走行が成功したとしても、それがすぐには安定した営業運転につながる訳ではありません。
このように考えた結果、安全で、天候にも左右されないで、エネルギ−を浪費しない乗り物として、地下のトンネルの中を飛ぶ地中飛行機という破天荒なアイディアが生まれました。
1.基本構想と研究会の発足
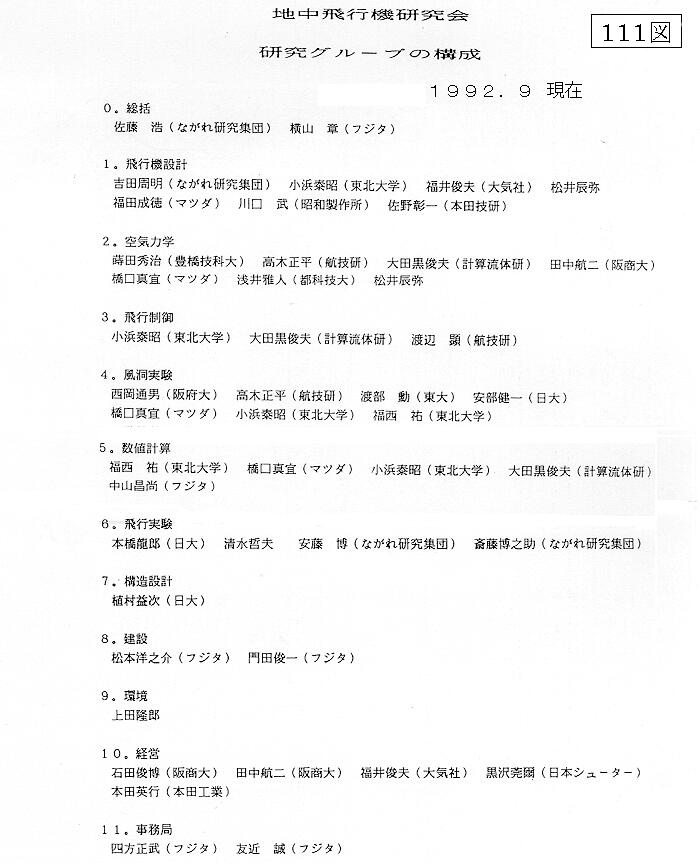
深い地下にトンネルを掘って、その中に飛行機を飛ばそうというアイディアが生まれたのは1992年のことです。これは、もともと株式会社フジタで構想されたジオポ−トの延長です。ジオポ−トというのは空港と都心とをトンネルで結び、旅客は都心で搭乗してトンネルの中を通って空港に運ばれて、旅行に出発するというものです。このトンネルは大きい割に利用度が低いので、これを東京、大阪間に変えて、その中に飛行機を飛ばすという構想が産まれました。そして、その実現の可能性を探るために、地中飛行機研究会が発足しました。10ほどの研究項目について全国的に呼びかけて、大学の先生や、国立研究所や、会社の人々など50人ほどの、いろいろな専門の研究者を集めることができました。飛行機そのものとしての地中飛行機は、大きさにしても、スピ−ドにしても、現在製作され、運行されている旅客機とさしたる違いはありません。特徴としては翼幅(スパン)が小さいこと、地面と側壁との衝突を避けるために十分な配慮がされるべきだ、ということです。必要とされる研究と開発を行う為の研究グル−プが作られました。グル−プの構成が111図に示されています。各グル−プの役割は次の通りです。
第1のグル−プは与えられた条件のもとで、どのような飛行機を設計できるかを探り、幾つかの設計例を提示します。
次は空気抗力を最小にして、燃費をできるだけ改善することを主眼とする空気力学の研究グル−プです。高速飛行機の抗力減少を目的とした境界層制御の研究は世界的な規模で活発に進められており、その成果が全面的に利用できます。例えば機体や翼面にリブレットと呼ばれる細い溝を並べることによって摩擦抗力が10 %も減少したという報告もあります。
つぎには単純化された模型を風洞の中で実験して、その空気力学的性能を調べるという仕事があります。特に地面と側壁で囲まれた空間の中での翼の性能を知ることが重要です。翼幅の小さい翼は誘導抗力が大きいのが常識ですが、地面と側壁の存在がその誘導抗力をどこまで小さくすることができるかという点に興味があります。また実際の飛行条件とは異なる風洞実験でどこまで実際に迫ることが出来るかを調べます。
次のグル−プは機体の材料、構造に関連しています。地中飛行機には窓が無く、与圧をする必要もないので構造はずっと簡単になります。また強烈な太陽に照らされることも、雨や雪で洗われることもなく、外気温度もほぼ一定していますから、耐蝕性、耐候性を神経質に考慮しないで、材料を幅広く選ぶことができます。
次には実際にトンネルの中で飛行機を飛ばしてみるグル−プです。むろん縮小された模型ですが、飛行機が実際にトンネルの中を飛ぶことが出来ることを示さなければなりません。風洞実験よりもずっと実際に近い実験です。トンネルには従来も知られていた地面効果のほかに、誰も考えたことのない側壁の影響があり、それらを実際の飛行によって調べる必要があります。その上でトンネルの中を壁に衝突しないで安全に飛ぶ方策を探ります。しかし小さな模型で制御の実験をするには限界があります。
実験と二人三脚をする相手が数値計算です。現在の計算技術は、まだすべての実験を不要にする程の段階には至っていません。実験と計算がお互いに補完し合ってこそ、良い成果を収めることができます。地面と側壁の効果を含んだ翼のまわりの流れ、翼と尾翼との相互干渉、摩擦抗力の軽減の見積もり、さらには飛行の安定性、飛行機の通過に伴うトンネルの中の流れといった空気力学の計算があります。
模型実験と数値計算の結果を取り入れて本格的に、安全な飛行をするための制御技術を発展させる必要があります。近年の制御技術の発達は目覚ましいものがありますが、その大部分は固体の運動に関連したものであり、飛行機のような流体の中の物体の運動を精密に制御する技術は未踏の領域です。それに対する第一歩を踏み出さなければなりません。
トンネルの掘削は純粋に土木工学の問題であり、関連する環境問題とならんで一つの研究グル−プを構成しています。また研究会の中で特に重要なのは経済問題の研究グル−プです。技術的にいかに興味があっても、経済的に成り立ち得ないアイディアには価値はありません。経済の専門家にお願いしてこの計画の可能性を徹底的に検討して頂くことにしました。
各グル−プでの活動は、長短、軽重の差はありますが、本報告ではこの研究の経過と結果についての全般的な解説を加えます。個々の成果報告は研究会の各メンバ−から提出され手研究報告No1−No9にまとめられましたが、統一をとるためと、読みやすくするために全部を私、佐藤浩が書き直しました。文責は私にありますが、それは決して何もかも私がやったことを意味するものではありません。
1.1 計画の概要
トンネルの中を走るのが何故電車でなく、飛行機かといえば、主なのは空気抵抗の点です。高速な乗物にかかる空気の抗力はその速度の自乗に比例します。自動車や列車のような地上を走る乗物でも、高速では機械的摩擦よりも空気抗力が支配的となります。消費エネルギ−の見地からすると、流体力学的に洗練されているのは、流線型の飛行機以外にはありません。飛行機は電車や、自動車に比べると抗力はずっと小さく、将来のエネルギ−事情を考えると飛行機の優位は動きません。そして飛行機の受ける抗力はほとんど空気との摩擦によるもので、この摩擦抗力をさらに減少させる技術的な可能性があります。それに比べて、地上を走る列車は著しく不利で、同じ速度で、同じ数の乗客の列車と飛行機を比べるとそのエネルギ−消費は3:1乃至5:1程度と見積もられます。しかし飛行機というものは空高くを飛ぶものであって、トンネルの中を飛ぶことなどはできまいという意見が飛び出しました。飛行機が地面の近くを飛ぶのは離陸、着陸の時に繰り返されているわけで、不思議なことではありません。また地面効果で揚力が大きくなるということも良く知られた事実です。固定翼は人類の最大の発明の一つで、磁場による浮上よりずっとよく調べられ、利用されています。
深地下の開発という課題を巡っては、アイディアが現われては消え、消えては現われますが、構想が奇をてらうだけのものであったり、経済性を全く無視した夢物語にすぎないものがほとんどです。我々のトンネルは地下40 mに作られます。この深さの理由は地上の土地の所有権は地下 40 mまでしか及ばないいう法律がごく最近成立したからです。この法律が施行されると、深地下では土地取得の資金が不必要となるわけです。
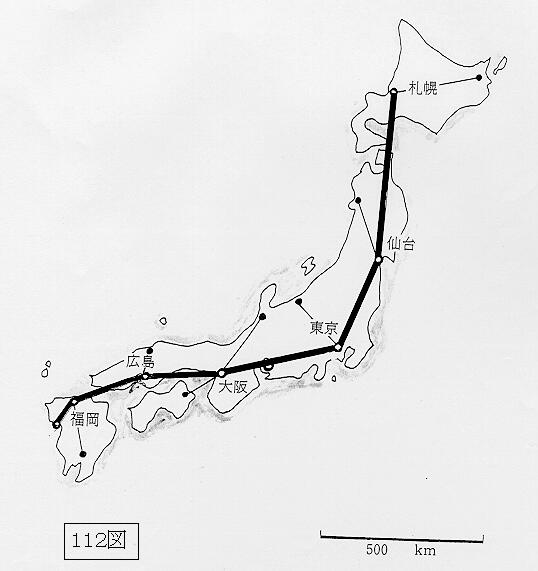
この計画は東京−大阪1時間という、割合いに小さな要求からスタ−トしたのですが、未来への豊かな夢をふくらますことができます。まず北へ向かっては、東京から仙台を経て、札幌までトンネルを延ばします。西へは、大阪から広島を通って、福岡を結びます。(112図)この幹線からは枝分かれトンネルが建設されます。
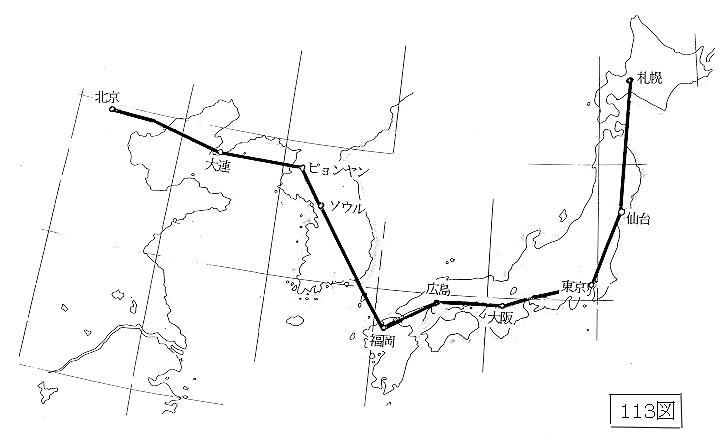
例えば東京から新潟、大阪から金沢、福岡から長崎といった調子です。幹線トンネルの中には地中飛行機と、あとで述べるように、電力、情報、エネルギ−備蓄などのほかに、中距離輸送システムが建設されます。夢としてはさらには対馬海峡の下を潜って、プサン、ソウルに達します。さらに北上してピョンヤン、大連を経て、北京までを結べば、これこそ
文字通りの EAST ASIA EXPRESS(東亜特急)と呼べるものになります。(113図)。この幹線は測り知れないほどの経済効果を持つだけでなく、この地域の平和の象徴となるでしょう。
まずどの程度の太さのトンネルを掘るかという問題から始めます。直径50 m のトンネルを掘るのが最善です。これが大型計画です。予算の関係などから小さなトンネルにせざるを得ない場合を小型計画とよぶことにしましょう。直径が 20 m程度の小型トンネルの掘削にはさしたる技術的な問題はありません。
大型計画では、深地下に直径50 mほどのトンネルを掘って飛行機を飛ばせます。使われる飛行機は時速 600 km,乗客400人という程度で、現在の大型旅客機に比べれば、小さくて、遅いのです。技術的な困難はほとんどありません。速度をこの値に抑えたのは、それが音速に近ずくと、機体や翼面から衝撃波が発生する可能性があるからです。トンネルのように囲まれた空間で衝撃波が発生すると絶望的な大きさの造波抵抗になり、非常に不利です。
深地下の開発は交通、輸送のためだけではありません。開発によって得られたノウハウはほかの分野にも適用されます。その一つの例は地中原子力発電所の建設です。必要性を完全には否定し難い原子力発電を本当に安全なものにするには、深地下に建設するのが一番です。そして運転を完全な遠隔操作とすれば、たとえ事故が発生しても地上に被害を及ぼすことはありません。そのほかにも化学プラント、色々な製造設備など、環境に有害なものをすべて深地下に移すことができます。
このようにして、危険なもの、汚いもの、騒々しいものがすべて地下に移され、排出物がそこで処理されれば地上は緑あふれる楽園となります。その建設には永い年月と、巨額の費用がかかるでしょうが、これこそが我々が子孫に残してやれる最大の贈り物ではありませんか。
1.2 トンネルの掘削
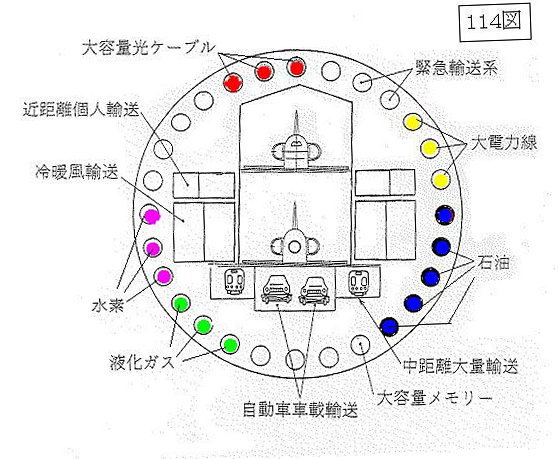
過去において、地下40 mに直径50 m のトンネルが掘られたことはありません。従って既存の技術はすぐには役立ちませんが、優秀な日本の掘削技術をもってすれば十分に可能となるでしょう。色々な工法の中でもっとも有力なのは、50 mの円周に沿って、直径3 mの小さなトンネルを掘り、その小トンネルの間をコンクリ−トで固めた後に、内部の土を掻き出す方法です。これは、飛行機の飛ぶ主トンネルのほかに、多くの小型トンネルを作るので、それが色々な用途を持つという利点があります。114図は想像される断面図です。
全コ−スをすべて地下40 mにきめてしまう必要はありません。地面の上に出てもよい所もあり、海中を通った方が安上がりの場所もあります。しかし外気が吹き込むのは困ります。内部はいつも外気とは遮断されているという前提で飛行機が設計されているからです。
すぐ問題になるのはこのトンネルの建設にどれほどの金がかかるか、ということです。予備的な調査も行われていないこの時期にそれを見積もることは難かしいのです。地盤が良いかどうかで建設費が大幅に変わるからです。非常に大胆な見積もりをしてみると40兆円という数字が出てきます。これはトンネルと駅、飛行機の開発、製作費なども含んだ額です。建設に必要な年数は予算のつきかたのよりますが、年間2兆円という規模なら、工事期間は20年間というのが常識的な線でしょう。
地下深くは地震に対して安全であると信じられてますが、どのような所、どのような地盤でもそうであるかどうかは分かりません。地中飛行機の為だけではなく、将来の深地下開発のための資料として、国家的な規模で色々な地下トンネルの安全性を調べる必要があります。
1.3 トンネルの多目的利用
この大型トンネルは周辺の直径3 mの小型トンネルをはじめ、幾つかに分割されています。それらをどのように利用できるかを考えてみましょう。
o中距離の大量輸送
現在の地方支線を地下に移す構想です。一種の地下鉄です。踏切が無くなるので交通渋滞の緩和になります。
o近距離の個人輸送
トンネルの中には雨も風もないので、屋根の無い、エスカレ−タ−に似た、動く椅子のような乗り物が可能になります。
o自動車の車載輸送
現在では生産地と消費地が全国的に拡散している上に、生産の段階に応じた半製品の輸送も増える一方です。高速道路を唸りを立てて疾走する大型トラックは大事故の原因であり、環境を破壊し、エネルギ−を浪費します。しかし列車輸送に対して、door to doorの便利さは捨てがたいものがあります。その自動車の長所を生かして、能率がよく、環境を破壊しないシステムが無蓋貨車を使った車載輸送です。これは特別に新しいアイディアではありませんが、最近の安価で、高性能のコンピュ−タ−の出現によってはじめて現実味を帯びてきました。自動車専用の駅に入ってきたトラックや乗用車は、行先に応じた無蓋車に乗り、運転手は降りてしまいます。その貨車はコンピュ−タ−の指令に従って連結されて出発します。目的地に近ずくと、適当に切り離されて、駅に入ります。運転手が駅で待っていて、入ってきたトラックを運転して駅を出ます。
o電力の輸送
小型トンネルの中に太い高電圧電線を通して大量の電力を送ることが出来ます。電線は将来は超伝導線に置き変わるでしょう。電柱からの吊線と違って、風や雨の影響が無いので、線の強度が不必要なのが強みで、強度が低いと言われる超伝導線にもってこいです。
o情報の輸送
情報輸送の要求は際限なく増大するように見えます。現在の光ファイバ−はもちろん、将来もっと密度の高い輸送線が出現しても充分に対応できます。
o燃料の備蓄と輸送
石油、液化ガスという化石燃料と水素を備蓄し輸送します。直径が3 m,長さが350 kmの小型トンネルの容積は350万m3で、その一本の貯蔵量はほぼ日本全国での4−5日間の石油消費量に相当します。 o水と食料の備蓄と融通
天災などの時の国民生活を保障するものとして、何種類かの食料を国家的規模で蓄えておく必要があります。地下は温度の変動が少なく、米のような食料の備蓄に適しています。
また毎年のように起きる局所的な水不足に対処する必要があります。国全体として水が不足することはほとんどありませんから、地下のトンネルで水を動かして融通し合うのがよいと思われます。
特別なものとして考えられるのは、
o発電
真夏の午後の電力消費のピ−クのとき、地表の水をトンネルの中に落して発電することができます。夜になれば余裕電力を使って、水を元に返します。また夜間の電力を使用して小トンネル内に圧搾空気を作っておいて、それを昼間に発電に利用することもできます。これは一種の電力の貯蔵です。
o大容量メモリ−
公共的なものとして巨大なデ−タベイスが将来建設されるでしょう。それの一部であるメモリ−は天災で破壊されてはなりません。そこでこのトンネルを巨大なメモリ−の収納場所として利用します。
o暖冷風輸送
日本列島は南北に長いのです。例えば夏には、涼しい高気圧の北海道の空気を、このトンネルを利用して低気圧の、暑い地方に送れれば良いでしょう。冬はその反対です。このような高気圧、低気圧の利用する送風はまだ試みられたことはありません。送られてきた涼しい空気を、水道で水をくばるように各家庭に配ります。ク−ラ−の代わりのこのアイディアでエネルギ−の大きな節約効果が期待されます。
1.4 環境問題
交通機関に関係した環境破壊は非常に深刻です。電気で走る電車には触れないことにしても、自動車や飛行機から出る排気ガスは空中に出ていって捕えようがありません。それに比べるとトンネルの中に出た排気ガスは、それを集めて適当に処理して外へ吹き出すことができます。これは地中飛行機の大きな利点です。
地中飛行機の環境に関する大きな問題はエンジンに関係しています。今のところ考えられるエンジンはジェットエンジンです。このジェットエンジンからの排気ガスと騒音でしょう。排気ガスについての究極的な対策は水素を燃料とする水素エンジンを開発することです。これなら排気は水ですから問題は殆どありません。普通の飛行機で燃料としての水素が嫌われるのは液体水素の比重が小さいので燃料の体積が大きくて遠距離飛行に適しないことですが、地中飛行機は航続距離が短いので燃料は少量で済み、かさばることはありまっせん。水素エンジンが間に合わなければケロシンの燃焼ガスを処理しなければなりません。高速道路の長いトンネルの中に自動車が渋滞した場合と、トンネルの中の地中飛行機との比較を次に示します。
排気ガスの発生量はトンネルの1 kmあたり、1時間に消費される燃料に比例すると考えます。地中飛行機の1台あたりの燃料消費は東京−大阪600 kmで4 tonとして、7 kg/kmです。自動車は1 kgのガソリンで10 km走るとすれば0.1 kg/kmです。飛行機が10分に1台運航されるとすれば、1時間にトンネル1 kmあたりに6機が入り、出ていきますので、1時間の燃料消費は42 kgです。これに対して時速50 kmで、車間隔を50 mとすると、1 kmあたりに1時間に入る自動車は1000台で、消費される燃料は100 kgとなります。これを見ると飛行機の飛ぶトンネルの中は渋滞した自動車トンネルより悪くは無いことが分かります。ここで採用された値はすべてが正確というわけではありませんが、この程度の排出ですと排気ガスの処理はさして難しくはありません。
次は騒音です。トンネルの内壁はすべて防音材で被われていますが、エンジンの音をすべて吸収することはできないでしょう。音が地上まで漏れてくることは考えられませんが、乗客と駅にいる人にはある程度の影響があるでしょう。しかし我慢が出来ないほどではありません。飛行機の機体には遮音、防音材が豊富に使われるのは当然ですが、位相をずらせた音を発生して積極的に音を消すことも考えられます。
2.地中飛行機の設計
2.1 設計条件
地中飛行機の設計は普通の飛行機とは色々な点で違っています。まずトンネルは狭いので翼幅を大きくすることはできません。それでアスペクト比が小さくなり、揚力が小さく、抗力が大きくなって不利です。しかし一方では地面と側壁の効果で実効アスペクト比の増大が期待できます。
地中飛行機の離着陸は通常の飛行機とは大きく異なります。通常の飛行機は離陸滑走距離をできるだけ短くすることを要求されるため、離陸のときに大推力を使用して大きな加速度を得るようにします。しかし上空で巡航に移ると、推力は過剰となります。また翼の面積も離陸のために大きくしなければならず、それがまた重量の増加を招くという悪循環に陥っています。地中飛行機にはこのような困難はありません。離陸滑走距離は5 kmでも10 kmでも差し支えありません。そこで加速のために必要なエンジンの推力は小さくて済み、離陸も巡航も同じ推力でよいという極めて有利な条件を持っています。
その他の地中飛行機に与えられる条件としては、
O 空気の密度が大きい。 1気圧です。
O 横風、突風の負荷がない。
O 与圧の必要がない。
O 窓がない。
O 雨や雪にさらされない。
これらは構造設計を非常にやりやすくします。
一方で地中飛行機に特徴的な技術は、
O 精密な位置、姿勢の検出が必要。
O 正確で迅速な、位置、姿勢の制御が必要。別系統多重冗長制御系を備えること。
上記の2つの技術はどうしても発展させる必要があります。
もう少し細かく分類すると、211図のような課題があります。
この中でも興味深い課題のいくつかを挙げてみましょう。
空気力学で乱流境界層の制御による空気抗力の軽減は将来のエネルギ−節約に結びつく画期的な技術です。翼や胴体の表面に溝や粗さを着けることが有望であることはよく知られていますが、実際の飛行機に応用することはできません。その最大の問題は、せっかくつけた溝などが雨や埃で崩れてしまうからです。地中飛行機はトンネルの中ですからこれらのトラブルがありません。
エンジンとして水素を燃料に使えば排気は水だけになる事もよく知られています。

2。2 大型飛行機
地中トンネルの直径が50 mならば飛行機はかなり余裕のある設計ができます。片道の飛行機に許される断面は高さ16 m、幅20 mほどです。飛行機の大きさとしては、現在のジャンボ旅客機と同程度の乗客数としてほぼ400人と考えます。これをほぼとすると、構造、エンジン、燃料などの重量を加えると、全備重量は100 tonあたりになるでしょう。この重量は現在のジャンボに比べると1/2以下です。それは窓がない、与圧の必要がない、翼の幅が小さいなどで、構造が簡単なことと、近距離なので燃料が少なくて済む事などが原因です。3種類の設計が行われましたが、共通な要目は次のようです。
座席数=400席 翼幅=18 m
巡航速度=600 km/h 飛行高度=1 m
全備重量=90 ton(構造=45 ton 旅客=40 ton 燃料=5 ton)
O大型A案 通常型
これは従来の旅客機のスタイルで、双発のプロペラ機です。221図が設計2面図です。
全長=80 m 胴体幅=5.2 m 双発 客室:全2階建
O大型B案 3翼型
地面のごく近くを飛ぶ飛行機の水平飛行を確保するには水平尾翼だけではうまくいきません。例えば頭が下がって揚力が減ったときに、水平尾翼の迎角を減らして頭上げモ−メントを作るわけですが、そのとき全体の揚力が減少して、飛行機はさらに沈下することになります。この沈下は地中飛行機にとっては危険です。地面に接触するかも知れません。そこで前の方にも水平翼を作ってその操縦で水平飛行を実現します。設計3面図は222図です。
全長=60 m 全高=10.3 m 翼弦長=8 m 単発 2重反転プロペラ
O大型C案 タンデム型
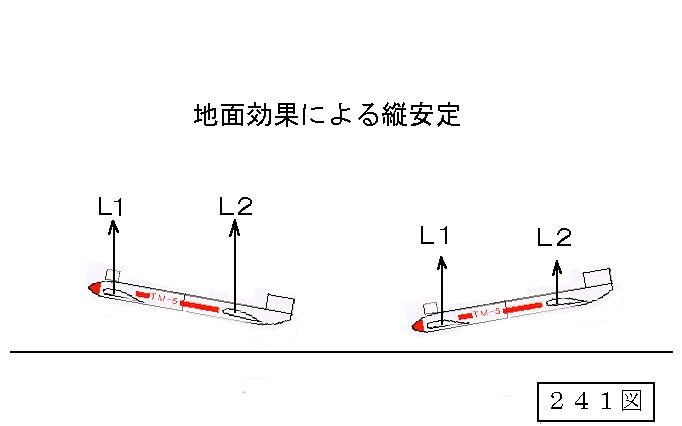
地中飛行機として最適な形状は前後二枚主翼(タンデム)でしょう。これは自発的なトリム安定が期待できる形です。頭が上がって後翼が地面に近づくとその揚力が増えて頭を下げようとします。頭が下がったときも前翼の揚力が増えて、もとに戻そうとします。
設計してみると、223図のようになります。
全長=60 m 全高=11 m 翼弦長=2.5 m 胴体幅=4 m 胴体高=6 m
揚力係数=0.72 翼抗力係数(翼面積基準)=0.03
胴体抗力係数(胴断面積基準)=0.1
座席の配置は224図のような2階建てです。設計図に基づいて製作された1/100模型の写真が225図です。エンジンは単発のタ−ボジェットです。
2.3 小型飛行機
トンネルの直径を小さくすると建設費を節約することができます。しかし小さいトンネルは飛行機だけのもので、ほかの利用はできません。トンネルの掘削直径を14 mくらいにします。これは現在の掘削技術で十分に対応出来る大きさです。こうするとトンネルの建設費は大型のものに比べて、1/10以下になります。支線トンネルではこの程度のものでよいでしょう。
トンネルをできるだけ小さくするために、与える条件は
トンネル内法直径=12 m、速度=600 km/h、客席数=200, 翼幅=9 m、
浮上高= 0.3 - 1 m です。
1時間10便、20時間営業で1日4万人の輸送能力があります。
O小型A案 3翼型 これは一枚の主翼に前水平翼と後水平翼を備えた、大型B案に似た形式です。
全長=60 m 全幅=9 m 全高=6 m 胴体幅=4 m 胴体高=4 m
全備重量=45 ton
揚力係数を0.5とすると、主翼面積は50m2、翼弦は7 m程度になります。
2面図が231図です。
O小型B案
胴体が主翼の中にとりこまれています。2面図が232図で、正面図が233図です。
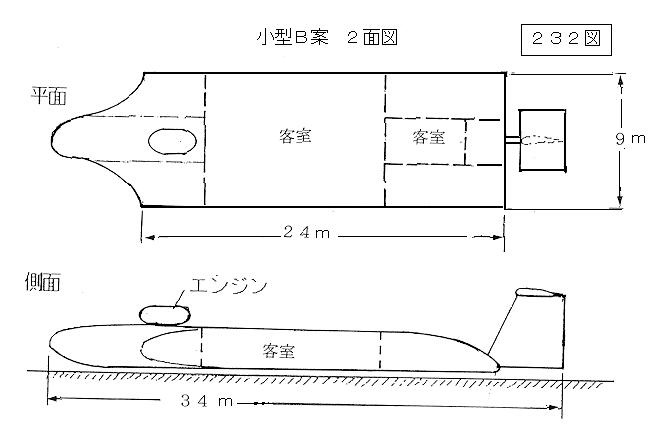
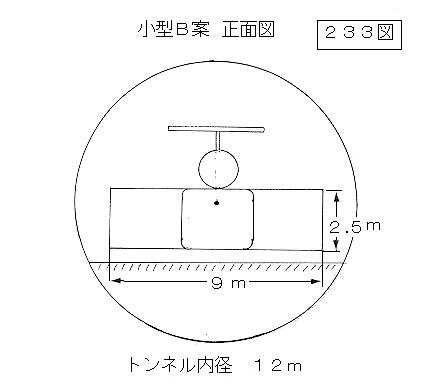
これを”ひらめ型”と称しています。その特長はきわめて小さいアスペクト比です。この設計では 翼幅/翼弦=0.38となっています。これは空を飛ぶ飛行機の10 -- 20に比べると驚くべき値で、普通は到底受け入れられません。しかしトンネルの中では地面効果と側壁効果によって満足すべき空気力学的な性能が期待されます。
次は翼内に作られた客席です。翼の最大厚さは2.5 mを越えるので、翼の中に客席を作ることができます。それと翼の中心を貫く幅の狭い前後の胴体とで200の客席を確保できます。
全長=34 m 翼幅=9 m 翼弦=24 m 胴体幅=3 m 全備重量=45 ton
客室面積=胴体+両翼=90+60=150m2
このひらめ型飛行機の模型を作って空気力学的特性の測定と、飛行実験を行いました。その詳細についてはあとで述べます。
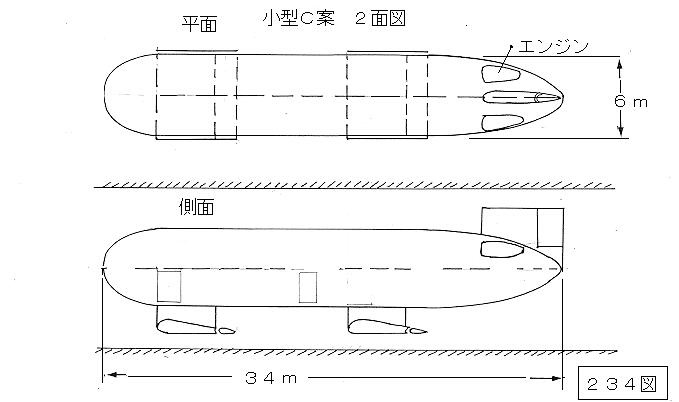
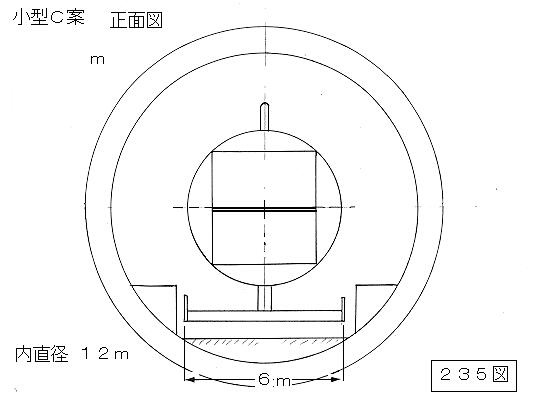
O小型C案 タンデム型
地面効果を持つ翼の上に胴体を支える形の設計です。胴体は強い地面効果と側壁効果を持つ二枚のタンデム翼の上に乗った形になっています。翼に及ぼす胴体の干渉がないので、翼に高い性能が期待されます。
全長=34 m 翼幅=6 m 翼弦=6 m 主翼前後2枚 翼面積=72 m2
重量=60 ton 2面図が234図で、正面図が235図です。
2.4 飛行の安全
飛行機がトンネルの中を飛ぶと聞くと誰でもが心配することは、飛行機が径路からはずれて壁や天井に激突するのではないか、ということです。別の言葉で言えば、飛行機というものをどの程度まで精密に制御できるかということです。飛行機の径路を1m以内の範囲で制御できるような技術は今までのところ知られていません。ここではそれがどのようにして可能であるかを検討します。まず飛行を不安定にする要因を調べ、飛行機の位置と姿勢を検出して、一定高さを維持する制御、側壁に接触しない制御を考察します。飛行機の原形としては223図のようなタンデム翼形式を想定します。操縦はすべてコンピュ−タ−によって行われることはいうまでもありません。
O 不安定要因
トンネルの中には横風も、突風も、乱流も無く、大気中を飛ぶのに比べると不安定をもたらす要因は少ないのです。唯一の擾乱は前方を行く飛行機の後流です。例えば10分間隔で運行されるとすれば、先行機の作った乱流が10分後まで残っていると、不安定要因となります。定速飛行では推力と抗力が釣り合っているので、一方向への流れが作られることはありません。大気中では後流は自由に拡がりますが、トンネルの中では壁で囲まれているので、減衰はもっと速いでしょう。後に述べるように(7章)小型模型の実験によればこの後流は十分に速く減衰するように見えます。ただ尺度やレイノルズ数が大きい実機では減衰時間は長くなるでしょう。翼の左右が異なった流れの中に突入するとトラブルのもとになります。トンネルの中には数多くの風速計を設置し、常時、風を監視しなければなりません。あまりに激しい乱れの存在が分かったら飛行機に着地走行を指令します。このとき抗力は増加しますが積極的にスピ−ドを落とす必要はありません。
次に考えられるのはエンジン出力の変化です。これは直接に機速の変化をもたらします。しかしここでは飛行とは無関係にジェットエンジンの推力が完全に制御されていると仮定します。
最後は重心位置の移動です。燃料の消費や旅客の移動などで重心が動きます。この移動は縦安定に大きな影響を及ぼすので、それに積極的に対処する必要があります。例えばエルロンの一部分の自動操作です。
O 位置と姿勢の検出
的確な積極的制御を行うためには機体の刻々の位置と姿勢を正確に把握する必要があります。
加速度計、角加速度計を機体の色々な部分に設置してその出力を処理することによって機体の3次元的な位置、速度、加速度と、角度、角速度、角加速度を知ることができます。しかしもっと精度を上げるためには別の検出方法を併用する必要があります。
左右の側壁に水平な線を引いておき、それを主翼翼端に設置された多くの小型テレビカメラで観測し、その画面から高度と迎角を高い精度で知ることができます。また左右の高さを比較するとロ−ル角が分かります。
地面の中心に飛行方向に線を引いておき、それを機体下面に設置した小型テレビカメラで観測します。その画面から横方向へのずれと方向角が分かります。この中心線は着地走行をガイドするにも役立ちます。
このような検出は高速なコンピュ−タ−の活用によってのみ可能になります。それと加速度計のデ−タを組み合わせれば位置と姿勢についての十分な精度の情報がリアルタイムで得られるでしょう。
O 高さの維持と縦安定
高さを一定に保つのは地面効果です。何かの拍子に飛行径路が高くなると、地面効果が減って揚力が低下し、高度が下がります。
主翼と水平尾翼を持つ普通の配置では自然の縦安定があります。二枚主翼のタンデム配置では自由空間では縦の安定はありませんが、飛行機が地面に近いときには241図の左のように迎角が増えたとすると後翼が地面に近付き、揚力が増えます。一方で前翼は地面から離れ、揚力が減ります。それによって頭を下げる安定モ−メントが発生します。逆に迎角が小さくなると、前翼が地面に近ずき、揚力が増えて頭を上げます。
もともとこの飛行機には急激な操縦は必要ないので、重心まわりの慣性モ−メントを大きくして差し支えありません。それによって撹乱を受けても迎角が急激に変化することを避けることができます。急激な降下は想像し難いのですが。もしそれが起きると脚の車輪が地面に接触します。一般的に、危険度がある値を越えたときは、翼からスポイラ−を出して減速し、着陸して大きな事故になることを防ぎます。
O 横滑り制御
左右の翼に上反角をつけて、ある程度の横安定を得ることができます。地中飛行機として最も危険な側壁への接近では242図のように翼が左に動いたとすると、下面から上面への流れが減って、左翼の揚力が増えて、右翼の揚力が減り、機体を右に傾けて、右方向に滑らせもとに返すことになります。
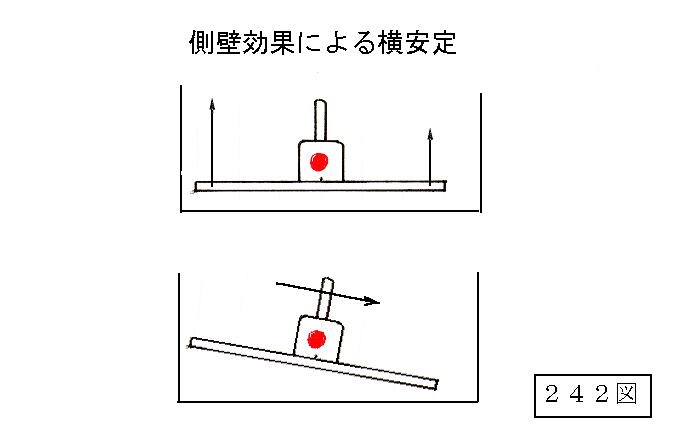
側壁は必ずしも垂直である必要はありません。上に向けて開いた形にしておくと、強い回復モ−メントが発生します。この傾いた側壁は高度の安定とトリム安定にも役に立ちます。地面効果を強化するものと考えてよいでしょう。
機首が左右に振れた時、それをもとに戻すモ−メントは、普通の飛行機と同じように垂直尾翼によって発生します。地中飛行機には操縦性はほとんど不必要なので、十分に大きな垂直尾翼体積を確保します。
ロ−ル角が発生してそれが回復する前に大きな横滑りをすると主翼が側壁に衝突する可能性があります。これが最大の危機で、あらゆる手段を動員してそれに対処する必要があります。緩やかなロ−ル角の回復は前後翼の、昇降舵を兼ねた左右の補助翼の舵角を変化して行なうことができます。地中飛行機の翼幅は小さいので胴体軸まわりの慣性モ−メントをあまり大きくとれません。このことは大きい加速度のロ−ルが発生しうることを意味します。そこで高速で、精密な回復モ−メントの発生が要求されます。
大きな加速度のロ−ルの発生が検知されたら、急開弁を開けて圧搾空気を翼端から上下に吹き出してロ−ルモ−メントを作ります。胴体の先端と後端から左右に吹き出すとヨ−モ−メントを得ることができます。この種の制御は決して最初の試みではありませんが、迅速な制御を必要とする地中飛行機には必須の技術であって、基礎研究を含めて、開発を進めるべきです。
O 緊急事態
上のような制御をかけても依然として側壁との衝突の可能性は残っています。そのときにとるべき手段として3つが考えられます。
まず側壁との間隔がある値よりも小さくなったときは急開バルブを開いて主翼の2つの翼端から横に向けて空気ジェットを吹き、それによって翼端を引き戻す力を得ます。その力は側壁に近ずくほど大きいので、有効な手段となります(243図)。
それでも側壁に接近するかもしれません。そのときは衝突を防ぐために、
243図のように翼端に、垂直の軸を持つ自由回転のタイアをつけて少し顔を出しておきます。衝突の衝撃はこのタイアと、それにつながれた緩衝系によって吸収することができるでしょう。
緊急の時はスポイラ−を立てて、減速、着陸します。それによって悲劇的な事故を避けることができます。
以上のような制御が成功すれば100%に近い安全な飛行を保証されます。その中には現在の技術でも可能なものもありますが、新しく開発する必要のあるものも少なくありません。制御技術の点から言えば、過去の制御は主として固体を対象としているのに対して、新しく流体の中の物体の運動を対象とする制御技術の発達を促すものとなります。
3.経済問題
技術的にいかに興味ある提案でも経済的に成り立たないものはただの夢物語にすぎません。新しい仕事には経済性について厳密な考察が必要です。地中飛行機の経済問題の解析は主として大阪商業大学の田中航二、石田信博の両氏によって行われ、その成果が文献2、文献11、文献12に述べられています。ここではそれらを要約します。
3.1 建設波及効果
まずトンネル建設の及ぼす経済効果です。この仕事の経費は大雑把に40兆円と見積もられています。20年ほどと想像される建設期間中は安定した大きな雇用機会を提供します。年間予算が2兆円で、波及効果の係数を4ととれば、年間8兆円の経済効果があります。
次に問題になるのは建設されたトンネルが健全に経営できるかということです。利益を計上して建設費を償還しなければなりません。収入の主力は飛行機の運賃です。
3.2 運航計画
営業としての地中飛行機をどのように運航するかという問題を取り上げます。時速600 km、1機あたりの乗客を400人として、1時間に12便(5分間隔)すなわち先行機との間隔を50 kmとします。これは衝突を防ぎ、先行機の残した乱流がおさまるのに充分な間隔でしょう。
1日に20時間運行とすると最大旅客数は
400 x 12 x 20=9.6万人/日(片道)
となります。これは磁気浮上リニア−カ−が目指している10万人/日(片道)にほぼ匹敵する旅客数です。
もちろんすべての便が満員ではありませんから、乗車率を50%と仮定しますと、往復で約10万人/日となります。これは東海道新幹線の現在の乗客数、36万人/日のほぼ30%で、それだけが地中飛行機に移行し、全体の乗客数が変わらないとすると、3:1で新幹線と乗客を分け合うことになります。
3.3 借り入れと返済
東京−大阪間の運賃を3万円とすると、1日の売上高は30億円で、年間の売り上げはほぼ1兆1000億円と見積もられます。これが地中飛行機事業経営の基礎になります。この事業は計算機の全面的な採用で、人件費などの経費がきりつめられているので純益率を40 % とすると年間4000億円の利益です。一方、先に述べたトンネルの多角的利用によって物流、流通網の売り上げによる利益が4000億円と見積もられます。この両方で1年間の利益は8000億円です。もし利息を免除して貰えれば、建設費は50年で償還できることになります
このような推算には甘い点があるかも知れませんが、大雑把に言えることは、全く実現の可能性のない夢物語ではないということです。
4.風洞実験
地面効果を調べるには風洞は必ずしも最善ではありません。その理由は模型は風洞壁に固定されていて、飛行機が地面のそばを飛ぶというより、地面と一緒に飛んでいる形になっているからです。しかし実験が簡単,容易であり、測定の精度が高いという利点があります。また地面にできる境界層の厚さよりも実験模型が高い所にある場合にはかなりの精度が期待できます。実験は3ケ所で行われました。
4.1 日本大学理工学部 責任者:安部建一
風洞は習志野市にあります。411図は風洞の平面図です。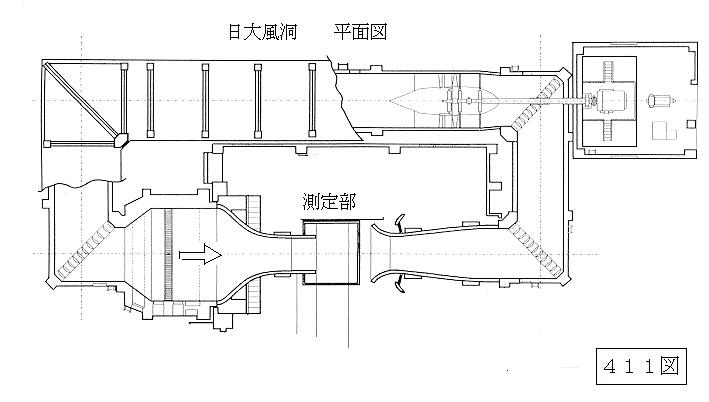
測定部の断面は本来は2 m x 2 mですが、横幅が1 mになるような側壁を作り、その間に翼模型をはさみました。模型の翼型は412図に示したようなCLARK Yです。
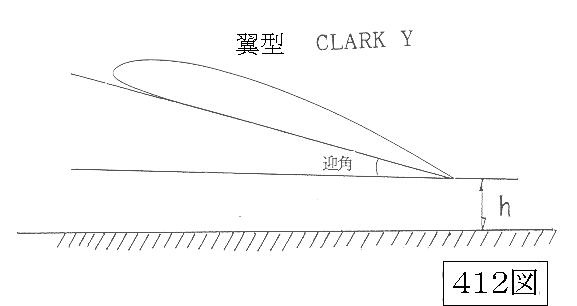
測定部の床面には模型にかかる3分力の測定ができる天秤が備え付けてあります。その天秤は2本の縦の棒を持っており、それに2次元模型をとりつけました。下流側の棒を上下して模型の迎角を変えることができます。天秤から模型までの距離が遠いので、縦モ−メントの測定には精度がありません。ここでは揚力と抗力の結果だけを示します。翼弦と一様流速で作ったレイノルズ数は
3.8 x 105です。
413図は地面から翼の迎角を−5゜から10゜まで変えて、翼の後縁の高さhに対してとった揚力係数です。
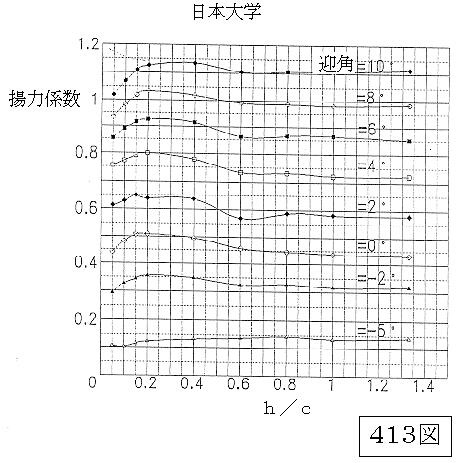
翼弦長をcとしてh/c>0.3までは地面効果がはっきりとしていますが、それよりも地面の近くではかえって揚力が減少しています。これは翼が地面板の上の速度のおそい境界層の中に入ったからと思われます。抗力の結果が414図です。
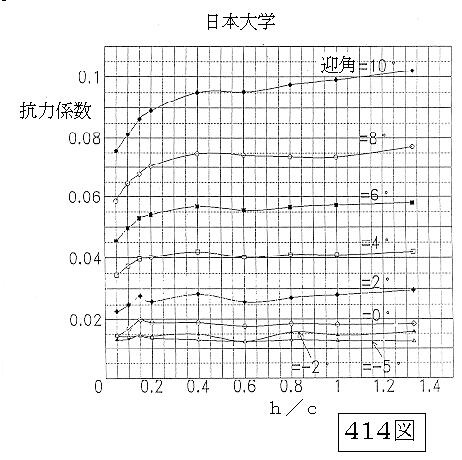
迎角が大きいときは地面効果によって抗力が減少するようです。これは誘導抗力の減少によるものでしょう。迎角が小さいと揚力が小さく、誘導抗力は小さいので地面効果はありません。h/c < 0.3では、やはり境界層の影響が見られます。
主翼と前後の水平翼をそなえた模型について 空気力学的な測定を行った結果が文献14に述べられています。
4.2 マツダ横浜研究所 責任者:橋口真宜
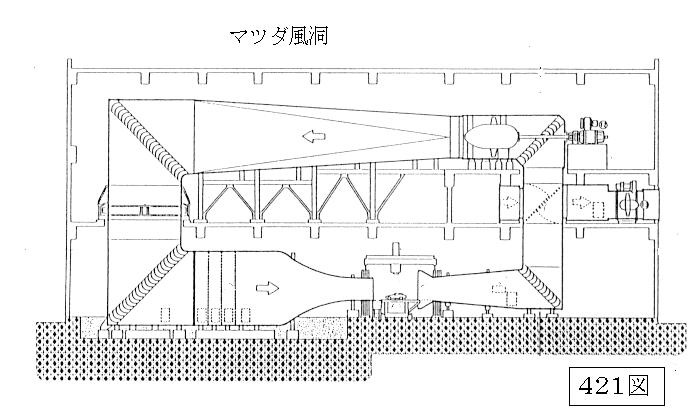
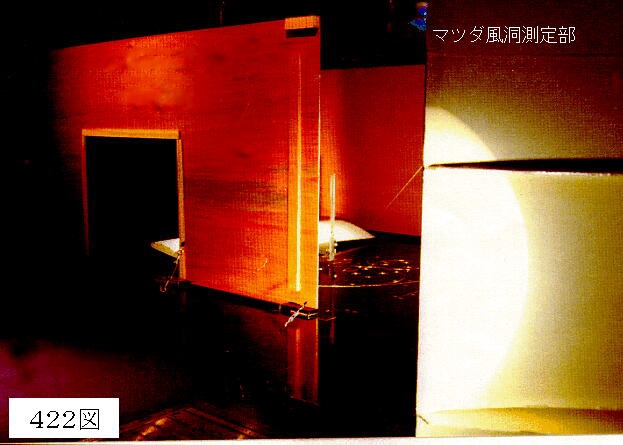
株式会社マツダは横浜研究所に中型風洞を持っています。測定部の寸法は長さが5 m、幅が1.5 m、高さが1 mで、最高風速はほぼ20 m/sです。測定部の床には境界層の吸い取りが施されています。421図は風洞の図面です。測定部に間隔1 mの側壁を設置し、その間に翼弦長が0.3 mの2次元翼型を挟んで空気力を測定します。翼型は412図に示したようなCLARK Yで、アスペクト比は3.3です。実験のレイノルズ数は 2 x 105 です。 翼端と側壁の間隔は左右各5 mmにしてあります。422図は測定部の写真です。2枚の側壁が見えます。左の側壁の一部が4角に切り取られたように見えますが、そこにはガラスがはめ込まれていて、中の流れが見えるようになっています。床に垂直な棒が立っていて、模型を支えています。そして翼の迎角と、床からの高さとが調節できるようになっています。棒にかかる力を自動車の3分力を測るための定置天秤で測定して、3つの分力すなわち、揚力、抗力、縦揺れモ−メントを測ります。

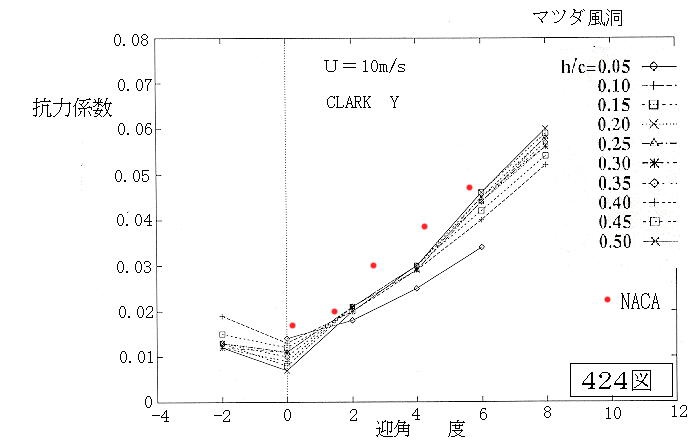
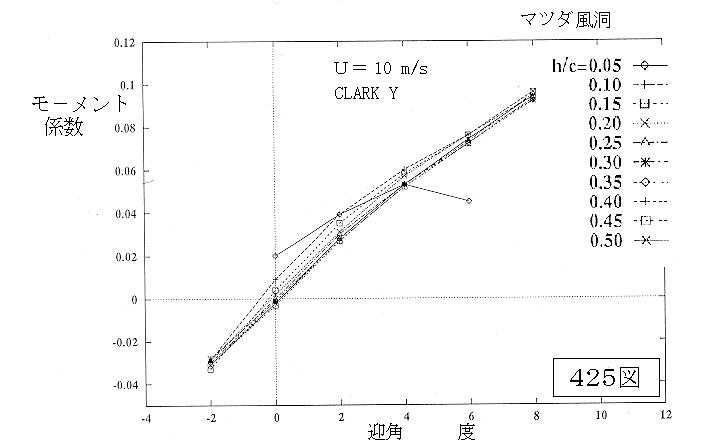
423~425図は測定結果です。迎角は6種類、床からの高さは10種類変えてあります。423図の揚力係数はhが小さいほど大きくて、地面効果がはっきりと分かります。赤い丸はNACAで行われた実験の結果です。アスペクト比が違いますので正確な比較はできませんが、ほぼ似たような結果になっています。地面からの高さhが非常に小さいと迎角に対して揚力が直線的になりません。失速しているとは考えにくいので、これは地面と側壁の影響と見られます。
迎角をパラメタ−としてh/cに対する揚力、抗力、モ−メント係数の形に表現したものが426−428図です。地面効果と側壁が揚力におよぼす効果は1.3から1.4倍と見られます。427図に示された抗力に対する地面効果では、h/cが小さくなると、迎角が大きいときは抗力が減り、小さいときは逆になるように見えます。その理由は今のところよくわかりません。縦揺れモ−メントに及ぼすh/cの効果は428図ですが、はっきりした結論は得られません。
4.3 航空宇宙技術研究所 責任者:高木正平
ここでの研究成果は2つの部分から成り立っています。詳細は文献6と文献12に述べられているので、ここでは要約にとどめます。
第1部は小型翼模型による煙風洞を使った観測と、翼面の静圧分布の計測です。翼として使われたのはGA(W)- 1と呼ばれるもので、下面が上に反っています。翼弦長は200 mm、翼幅は100 mmです。
地面の存在によって翼下面の圧力が全域で上昇し、上面の前縁近傍では圧力の減少が見られます。これはよどみ点が下面下流側に移動したためのようです。
地面板の上では、前縁付近で剥離が発生し、その下流には定在する渦構造が形成されます。これは地面板が流れに相対的に動いているからで、止まっている地面の上を翼が飛ぶときには違っている筈です。
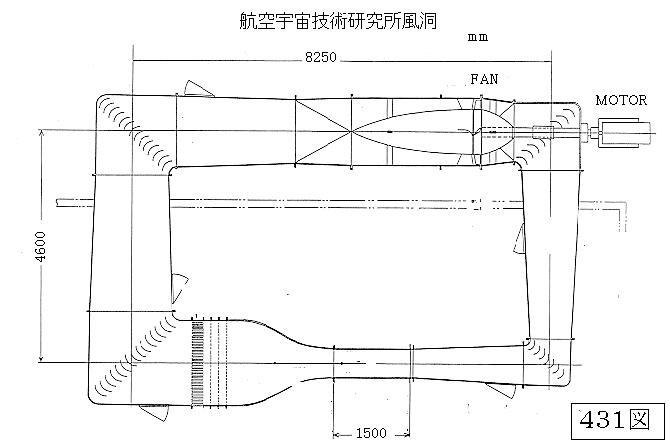
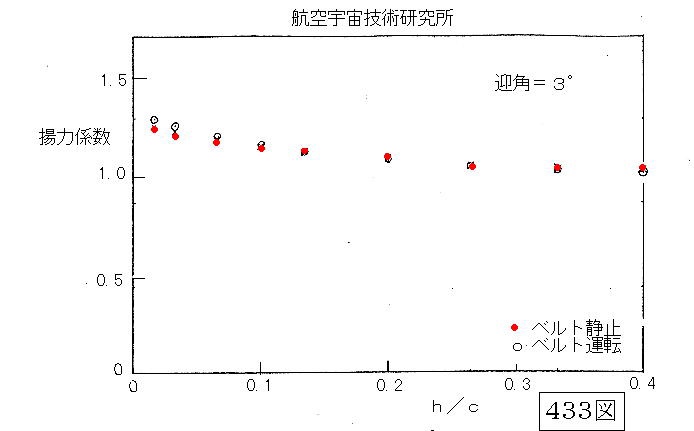
第2部では測定部に設置された走行ベルト装置を使って2次元翼に加わる力と周辺の流れを計測しました。使われた風洞は431図に示されています。測定部の寸法は、幅が550 mmで、高さが650 mm,長さが1500 mmで、主流速度は6 - 6.5 m/sです。模型の下の地面板は測定部の床から15 mm浮いており、その入口で境界層を吸い込んでいます。その下流にある走行ベルトは幅が530 mm、長さが800 mmで、最高速度は60 m/sです。432図は測定部のスケッチです。天秤は翼を上面で支え、揚力、抗力、縦揺れモ−メントを計測できるようになっています。またトラバ−ス装置によって地面からの高さを変えることが出来ます。
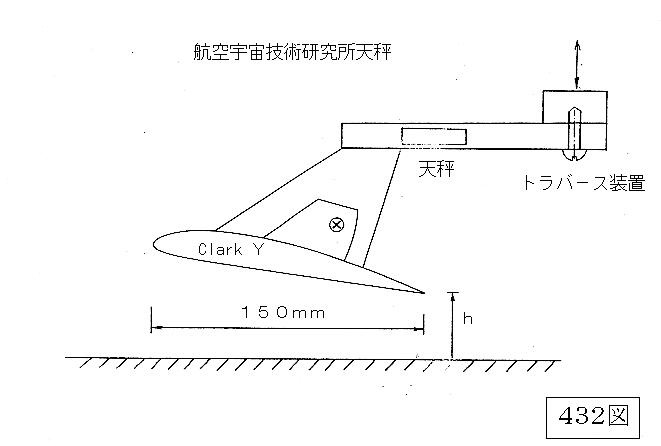
最大厚さ15%のCLARK Yの翼型模型について測定された結果が433−438図に示されています。これらは天秤の特性についての補正は十分にされていないので、値そのものには誤差を含んでいますが、傾向ははっきりと示されています。
揚力係数の、高さに対する変化が433図です。迎角は3゜です。後縁高さの翼弦に対する比, h/cが40%以下になると地面効果が現れ始めて、その最大効果は20%に達しています。さらに走行ベルトを走らすことによって、揚力が5%ほど増加します。翼の周りの流れの測定によれば、この揚力増加は地面効果によって翼の実効迎角の増加によることが確かめられました。
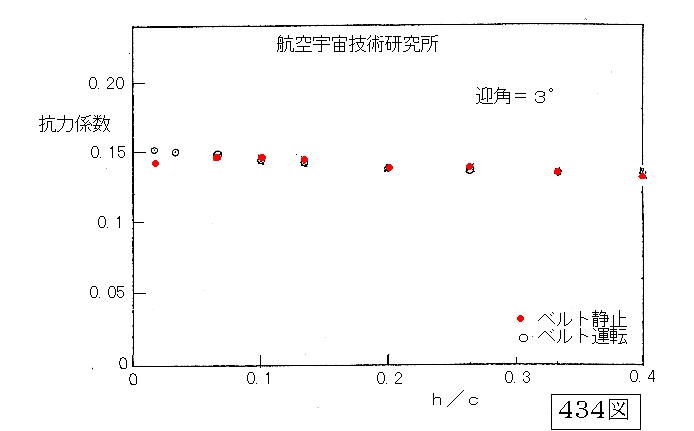
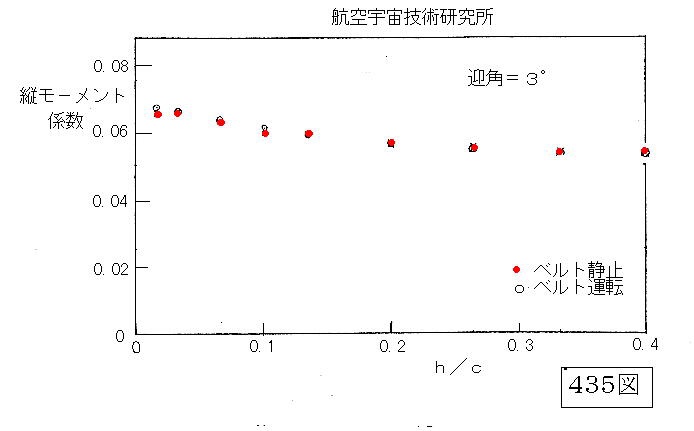
434図の抗力係数には地面効果は殆どありません。縦揺れモ−メントの結果は435図です。地面効果によってやや頭上げのモ−メントが増えています。
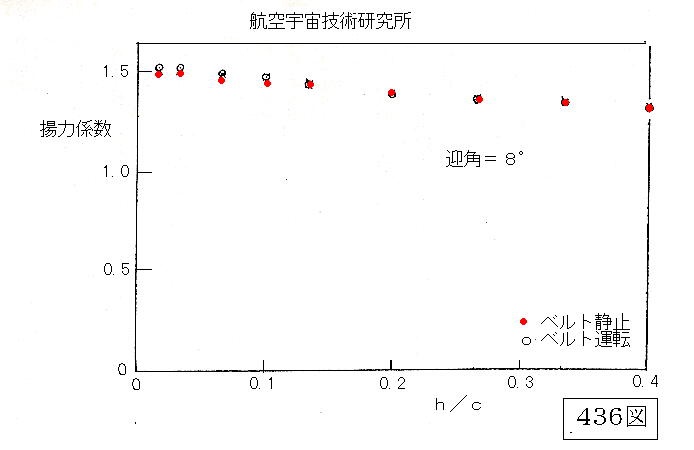
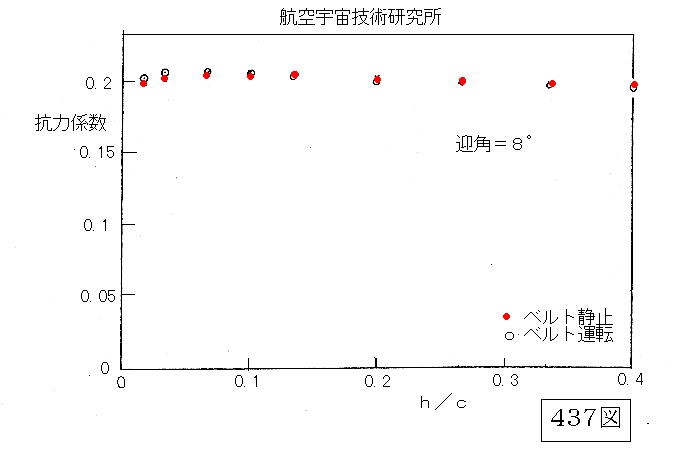
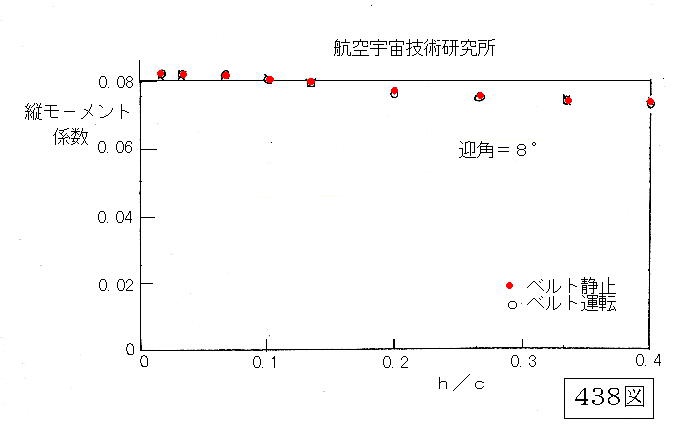
迎角が8゜のときのデイタが436−438図に示されています。当然の事として揚力は増えています。地面効果は迎角3゜の時と変わりません。抗力が地面のそばで少し減っているのは誘導抗力の減少によるものでしょう。モ−メントにもさしたる特長はありません。
全般的に言えるのはベルトが走っていても、いなくても差は少ないということです。
一方で、地面の上に発達する境界層を吸い込んでやれば、地面と模型が相対的に動く場合をかなりよく模擬できることを示しています。
5.入間実験場
地中飛行機の可能性を実地で確かめるために、模型の飛行実験を行うことにしました。地上に細長いトンネルを作り、その中を模型飛行機を飛ばせて、性能を調べます。実験の目的は3つです。第1は地面と側壁とで囲まれた空間の中を飛行機が飛ぶときにどのような力を受けるかを知ること。第2はプロペラと操縦面を持つ模型飛行機を実際に飛ばせて、その飛行状態を観察、解析すること、第3は飛行に伴って作られる流れを知ることです。
5.1 模型トンネル
トンネルが建設されたのは1993年3月です。場所は埼玉県入間市扇台の株式会社フジタの工場の跡地です。511図はその付近の地図で、青い丸印が現地です。トンネルは長さが50 mで、その内法の幅は1.5 m,高さは0.8 mです。512図がその全景です。
実験グル−プの3人が見えます。これは実験をしている時の状態で、実験をしないときはは雨風を防ぐためにトンネル全体が513図のように青いシ−トで被われています。
514図は模型トンネルの断面図です。コンクリ−トの土台の上の骨組みはH型鋼で構成され、その上にベニヤ板でトンネルが作られています。側面の一方と天井は中央の30 mが透明エンビ板で作られていて、内部の観察ができるようになっています。ベニヤ板で作られた床の中央には巾40 mmの隙間があり、その下の巾600 mm、深さ200 mmの空間を模型飛行機を載せた台車が走ります。模型飛行機が飛んでいる有様が515図です。

トンネルの一方の右端は出発端で、そこで模型を整備したり、パソコンを使って必要な測定を行い、飛行を制御します。もう一方の端、すなわち向かって左には模型が滑らかに着陸できるような着陸端が設けられています。516図はトンネルの内部を出発端から着陸端を眺めたものです。

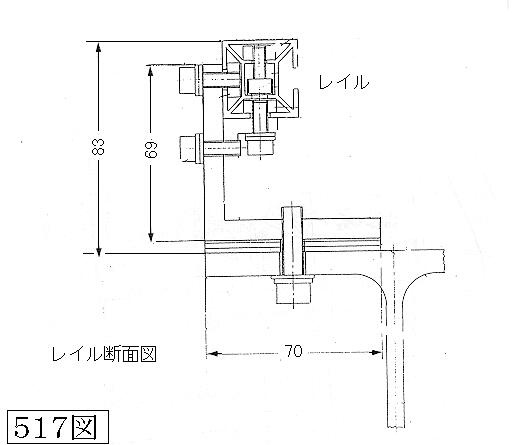
トンネルの鋼の構造材の上には2本のアルミニウムのレイルがとりつけられています。その長さは50 mで、断面は517図のような四角型になっています。このレイルは特殊な断面のアルミ引抜き材で、構造材に取り付けられたL金具に横から締め付けられています。上面は滑らかで、水平が保たれています。慎重な調整によって、レイルの直線からのずれを全長50 mにわたって1 mm以下に抑えることが出来ました。鋼とアルミニウムとでは熱膨張率が違うので、夏と冬とで盛り上がったり、ギャップが発生する可能性があります。それを防ぐために、とりつけた場所で両方が滑ることのできるようにしました。その結果、今までのところ気温の変化にによるトラブルは発生していません。 床の下は外気の流入を防ぐためにベニア板を張りつめてあります。
5.2 台車
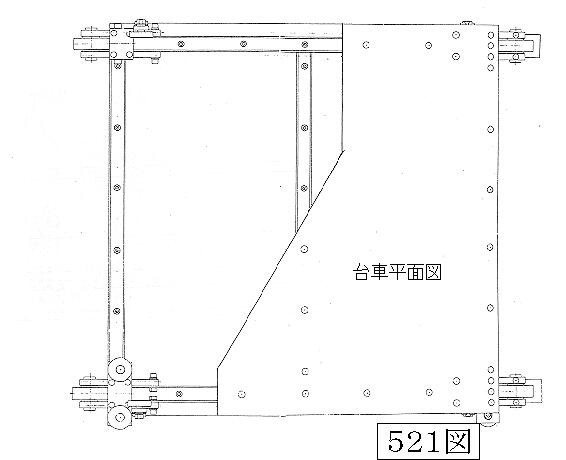
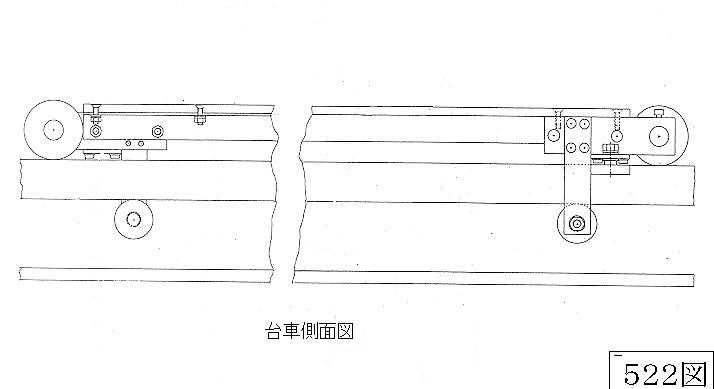
レイルの上を台車が走ります。この台車の役割は2つです。1つは台車の上に模型にかかる揚力、抗力、ピッチングモ−メントの3分力を測る天秤を載せて走ること、もう1つは飛行模型を乗せて離陸速度まで加速するカタパルトの役割です。台車の平面図が521図で、側面図が522図です。構造はU型アルミ材とアルミ板の組合せです。車輪としてはレイルを上下にしめつける一組の車輪と、レイルを横からはさむ形の車輪とから作られ、走行時に横揺れが無く、上下の振動を最小にするように設計、製作されています。台車と天秤などは床の下を走り、模型は台車から立ち上がった、走行方向に長く横方向に薄いL字型の台で支えられています。
台車の走行は出発端に設置された直流サ−ボモ−タ−によっています。モ−タ−にとりつけられたプ−リ−と、着陸端に置かれたプ−リ−ベッドに鋼線が巻きつけられていて、その鋼線の両端が台車の前端と後端にとりつけられています。モ−タ−の回転によって台車が引っ張られ、回転方向によって前進または後退します。モ−タ−はコントロ−ラ−と、コンピュ−タ−で厳密に回転速度を制御されます。モ−タ−の最高回転数は4,000 rpmです。それに相当する台車の速度は10.5 m/sです。
台車の着陸端への激突を避けるためにいろいろな手段を講じました。まず出発端から44 mの地点を台車が通過したときに電源が切れるようなスイッチを設けました。さらにモ−タ−の回転が44 m相当に達したときにも切れるようにしました。また台車駆動のプログラムの中でいつも台車の位置を訊くことにしました。それでも軽度の衝突は年に2−3回発生しました。
5.3 出発端
出発端は平面が5 m x 10 mほどの建屋で、飛行機の整備や、測定の準備、制御のプログラミングなどがここで行なわれます。531図はレイルの始端で、台車がレイルに乗っています。

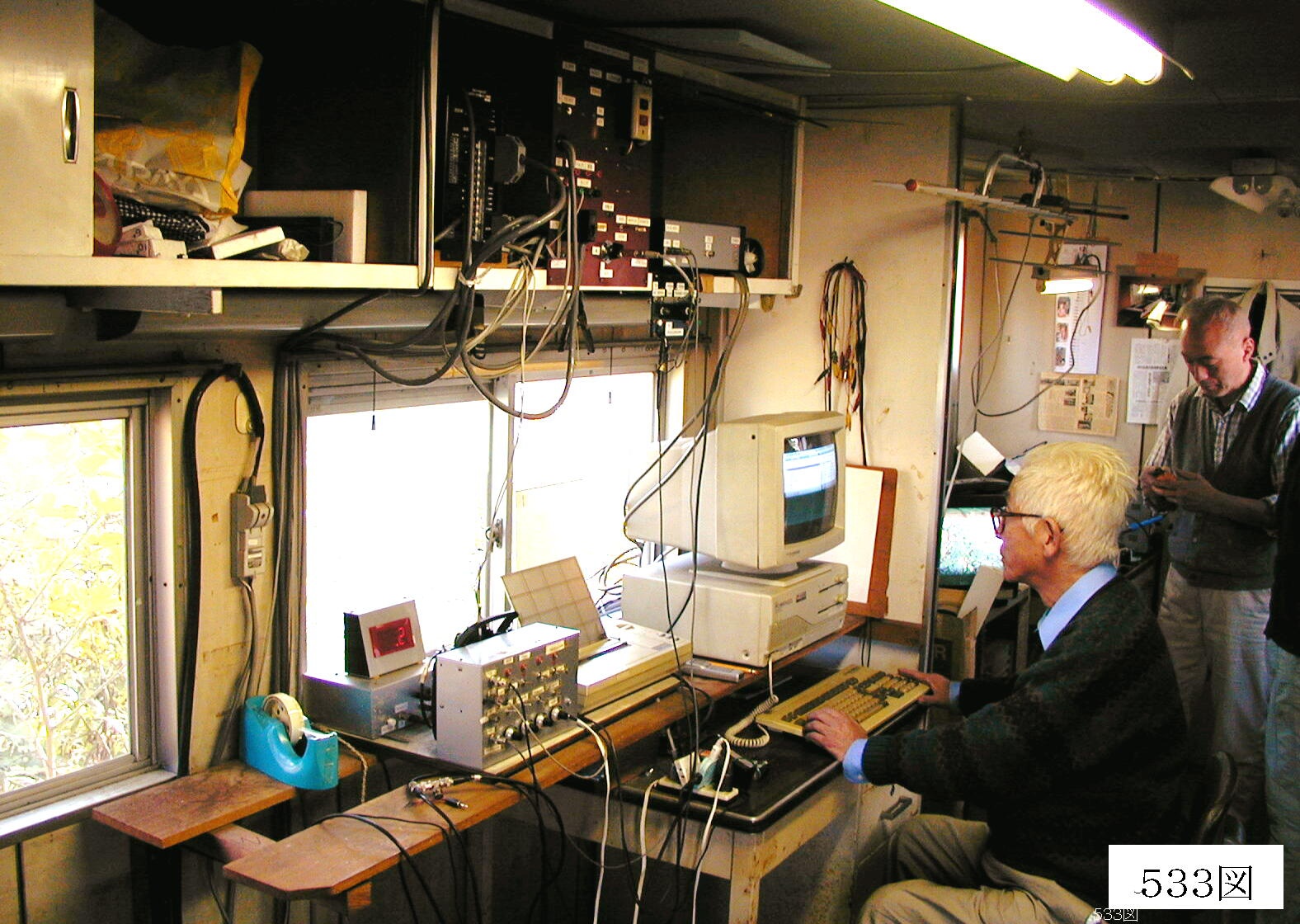
532図は台車の駆動部です。黒いサ−ボモ−タ−とプ−リ−の横に切り欠きのある赤い円板が見えます。円板を挟んで小さな光源と受光素子があり、切り欠きがそこを通過するたびにパルスが発生します。そのパルスの数を数えると台車の走行距離が分かります。533図は制御センタ−です。写真の左上はサ−ボモ−タ−のコントロ−ラ−で、右下はすべての計測と制御を行うパソコンです。左下はプリンタ−などの周辺機器です。
5.4 着陸端
模型飛行機は台車に乗って離陸速度まで加速されてから、減速に入るとともに、遠隔指令によってプロペラの電源が入り、模型は台車を離れて自由飛行をします。ほどよい所で着地してからプロペラを止めて地上滑走します。その滑走を食い止めるのが着陸端です。50 mのトンネルのもう一方の端に長さ10 m、幅3 m、高さ2 mほどの建家が作られ、その中の床に柔らかいクッションが敷かれています。飛行機はトンネルの中で着地して、床を滑って、クッションで止まります。一回ごとに再び台車に載せて、出発端に送り返します。
5.5 制御と計測
すべての制御と計測はパソコンの主導権の下にあります。台車の運行には手動と自動がありますが、手動は模型を着陸端から送り返すときに用いられるのみで、測定と飛行のときは自動で、パソコンからの指令によっています。パソコンのプログラムはMS−DOSをOSとしたC言語で作られたオリジナルなものです。台車の移動の制御はサ−ボモ−タ−に与える電圧によって行われます。天秤で力を測るときは台車の加速度を出来るだけ小さくして模型の振動を防ぎます。一方、自由飛行のときは大きな加速度によって短い距離で最高速度に到達して、自由飛行の距離を大きくします。
台車と飛行機は高速で移動しているので、コンピュ−タ−との連絡はすべてVHF帯の無線によっています。コンピュ−タ−からの指令はDAコンバ−タ−でアナログ信号に変換されて送信されます。台車の加速度、最高速度、その持続時間、減速度などはプログラムで自由に選ぶことができます。またデ−タとして機体にかかる空気力、機体の離陸信号、プロペラの入力などがあります。
5.6 建設チ−ム
建設はながれ研究集団と株式会社フジタとの協力で行われました。基礎と建屋はフジタの手で、レイルの敷設は共同で行われました。台車の設計、製作、制御、計測システムはながれ研究集団の分担でした。建設に関係したメンバ−は下記の通りです。
フジタ 故松本洋之介
ながれ研究集団 佐藤 浩 吉田周明 清水哲夫 中村 宏 安藤 博
斉藤博之助
561図 は左から吉田、中村、佐藤、斉藤です。
6.単独翼走行実験
単独の翼に加わる力がトンネル内の走行によって測定されました。風洞実験では模型が流れの中で地面に対して静止していますが、走行実験では模型が地面に対して動いています。そのことで現実的な地面効果が見られると共に、過去においては考えられなかった側壁の影響も調べられました。
6.1 翼模型
翼模型の翼型は412図の古典的な CLARK Y で、平面形は矩形です。翼弦長は300 mm、翼幅は611図のように1,200 mmのもの(模型1)と、1,400 mmのもの(模型2)です。アスペクト比はそれぞれ 4 と4.7 という非常に小さい値です。これは翼幅を大きくとれない地中飛行機を念頭に置いたからです。翼幅の違う2つの模型を準備したのは側壁の影響を調べるためです。翼端と側壁との間隔はそれぞれ、150 mm、50 mm です。この間隔が小さいときは翼端からの巻き上がりが抑制されて、実効的なアスペクト比が大きくなり、揚力が増えて、誘導抗力が減少することが期待されます。
このような走行実験での誤差の最大の原因は模型の振動で、その振動は主として台車の加速過程での加速度の変化から発生します。それをできるだけ小さくするには台車の加速度の変化をできるだけ小さくし、模型を軽く作って慣性を小さくすることが必要です。そこで模型を発泡スチロ−ルで作り、金属の主桁を通して、表面を薄いフィルムで被いました。重量はほぼ 350 g です。
6.2 計測装置
模型は台車の上に乗って、四面が閉じられた走路(トンネル)の中を走行します。ここで重要な因子は迎角と、翼の後縁の地面からの高さhです。hが小さい時は地面効果による揚力の増大が期待されます。実験範囲は、翼弦長cで無次元にした値で、h/cが 0.05 から 0.3 までです。
床の中央に巾 40 mmの隙間が切ってあります。床の下に2本のレイルが敷かれており、その上を台車が走ります。台車からは柱が立ち上がって、隙間を通して模型を支えています。台車を駆動するのはサ−ボモ−タ−のプ−リ−に巻き付けられたワイヤ−です。最高速度は 10.5 m/s で、パソコンからの指令により、加速、減速のどのようなパタンの走行も可能です。
走行台車の上に3分力天秤が作られました。主要部は 40 cm x 40 cm の浮枠で、その4つの頂点を燐青銅板で支えます。天秤を上から見たのが621図で,正方形の浮枠が見えます。
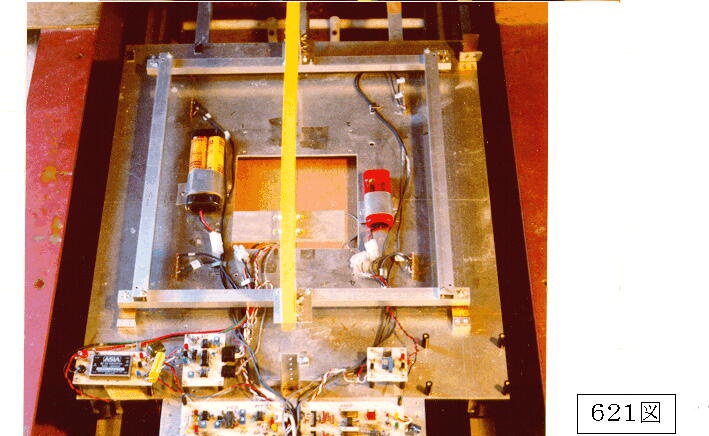
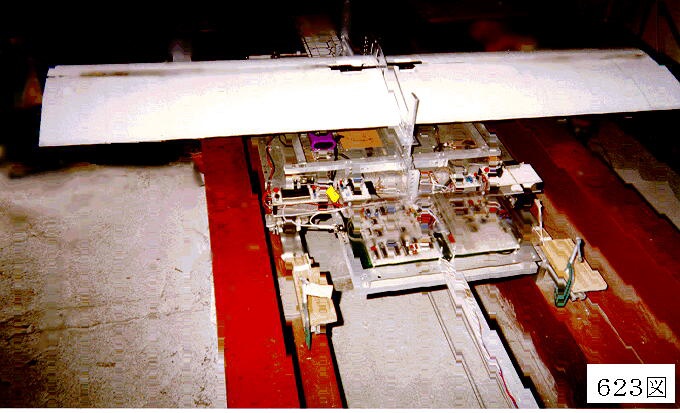
黄色い棒の所に翼が乗ります。棒の左右に電池があります。燐青銅板の両面には歪みゲイジが貼り付けられています(622図)。前にかかる垂直力が第一揚力(L1)で、後ろの力が第二揚力(L2)です。623図は翼を載せたところです。
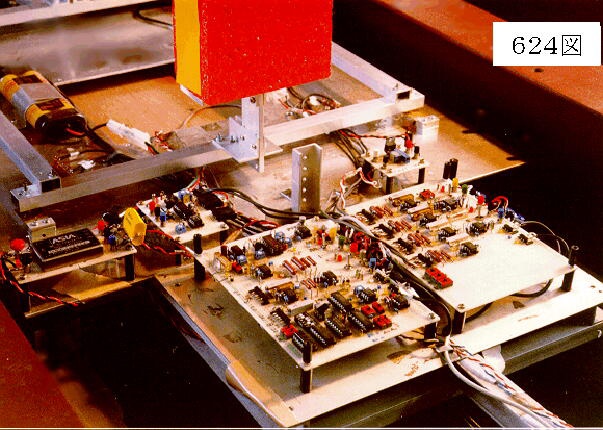
翼の手前の下にあるのが自家製の電子回路です。624図はその詳細です。
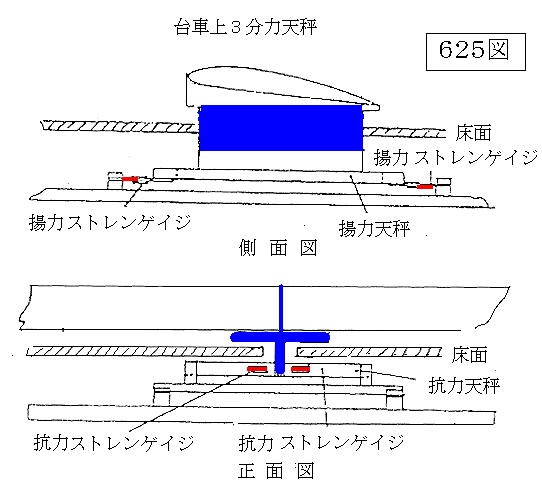
抗力天秤はこの浮枠を前後から支えていて、支える点に歪みゲイジが貼り付けられています。この抗力天秤は前後に柔らかく、上下には剛い構造となっていて、抗力測定におよぼす揚力の影響を最小にしています。625図は天秤の正面図と側面図です。
柱の長さを調節して地面からの翼の高さと迎角を変えることができます。翼は翼幅の中央で薄い板で支えられ、その板を動かして迎角を変えられるようになっています。
歪みゲイジの構成するブリッジの不平衡電圧は増幅されて後、電圧−周波数変換回路で、オ−ディオ周波数に変換されます。その信号はVHF帯の搬送波を振幅変調してから基地に伝送されます。基地局は受信した信号を復調して、オ−ディオ信号を得、その周波数をコンピュ−タ−のプログラムによって測定して、力の値を知ることができます。増幅された歪みゲイジの電圧を直接に使わないで周波数に変換するのは台車と基地局との距離の変化による電波受信強度の変化による誤差を避けるためです。電波は時に障害を受けることがあり、障害が烈しい時はテイプレコ−ダ−を台車に取り付けて、周波数を記録して、あとで解析します。624図のうち左側の部分は歪み測定、右側は伝送系の回路です。実験の最初と最後に力と周波数の較正が行われます。626図は揚力天秤の較正曲線の一例です。
測定のための台車の速度は 7 m/sで、このとき翼弦長を長さとしてとったときのレイノルズ数は1.5 x 106です。627図は台車が出発してからの速度の変化を示しています。
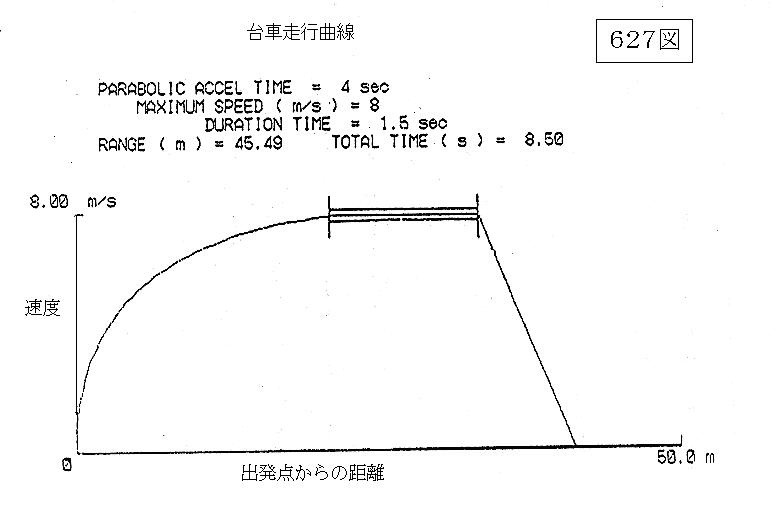
図の水平3重線の部分が定速走行で、測定はここで行われます。時間にして 1.5秒、距離にして約10 m です。定速走行になるまでの走行は加速度の時間微分が連続になるようにプログラムされています。加速度が不連続に変化すると、台車に力が加わって振動が発生するからです。それでも振動を完全にゼロにすることはできませんでした。加速度をできるだけ小さくすることが望ましいのですが、トンネルの全長が50 mという制限のために、ある値以下にはできませんでした。抗力と揚力の測定は多少の干渉を持っています。揚力に対する抗力の影響は無視できます。抗力に対する揚力の影響は較正によって補正されました。
6.3 揚力
風洞実験に比べると走行実験の精度は低くなります。それは走行に伴う模型の振動を完全に止めることはできず、またトンネルの中を完全に無風とすることができないからです。たとえば 0.5 m/s の風があれば、それだけで5 %近くの誤差になります。そこで同一条件の時に5回の走行測定を行い、その平均をとることにしました。
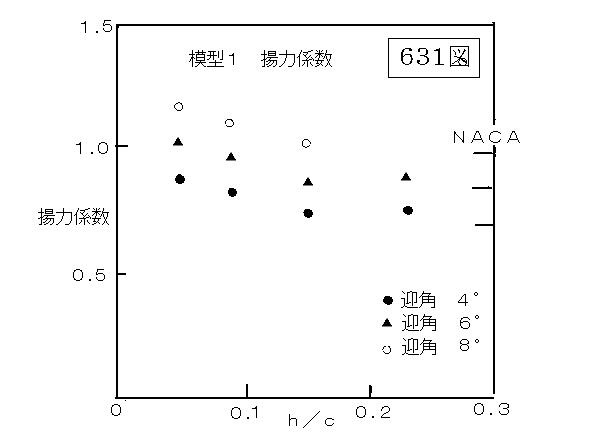
測定結果を631図に示しました。迎角を4゜, 6゜, 8゜に変え、地面からの高さに対して揚力係数が示されています。地面効果は明らかです。h/c >0.2 あたりになると揚力係数はほぼ一定で、自由飛行と同じ値になります。地面効果による揚力増加は約 20% ほどです。参考文献によるNACA での測定結果が横線で示されています。NACAの方がレイノルズ数は2桁近く大きく、アスペクト比も異っていますが、地面効果の無い高さでの我々の揚力係数の方が大きいようです。その原因は側壁の存在でしょう。側壁は翼の下面から上面への巻き上がる流れを抑制して、実効的なアスペクト比を大きくする効果があります。
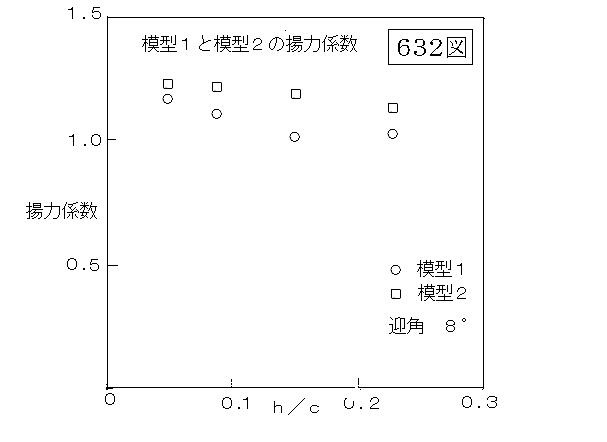
迎角 8゜での模型1と模型2の揚力の比較を632図に示しました。模型2の揚力係数は模型1のそれを 10% 近く上回っています。アスペクト比は4 から4.7 に増大していますが、それよりも大きい側壁の影響がはっきりと現われています。
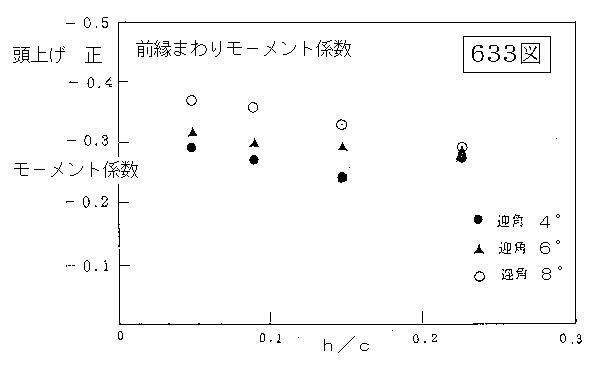
二つの揚力が測られているのでピッチングモ−メントを算出することができます。迎角や高さを変えたときの翼前縁まわりのモ−メントの変化を633図に示しました。このモ−メントの大きさはほぼ揚力そのものに比例しています。すなわち揚力の着力点が激しく移動することはありません。
6.4 抗力
抗力は揚力の1/10の程度なので測定の精度は低いのです。抗力測定には翼を支えている板の抗力がつけ加わるので、その補正も行われました。
迎角 4゜と8゜で測定された抗力係数が641図に示されています。h/c が小さくなると抗力もほぼ20%減少します。これは誘導抗力の減少によるものでしょう。
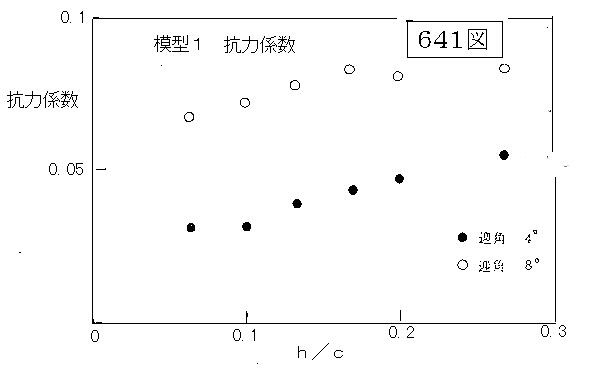
NACA の実験結果も横線で示されています。翼の抗力は揚力と違って、レイノルズ数の影響が大きいので直接の比較は意味がありませんが、h/cが小さいところでほぼ同じ抗力係数を示しているのは興味があります。
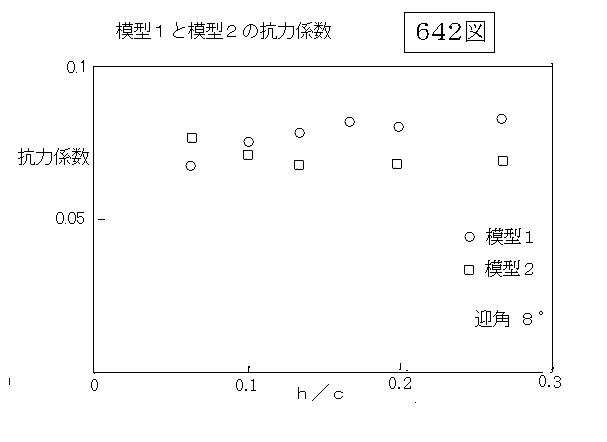
迎角 8゜のときの模型1と模型2の抗力係数の比較が642図に示されています。模型2の抗力はhの大きい所では模型1のそれを下回りますが、hの小さいときにはかえって大きくなります。これは側壁と地面が交叉する隅の部分では模型2の翼端が強い乱流を作り出すためと考えられます。
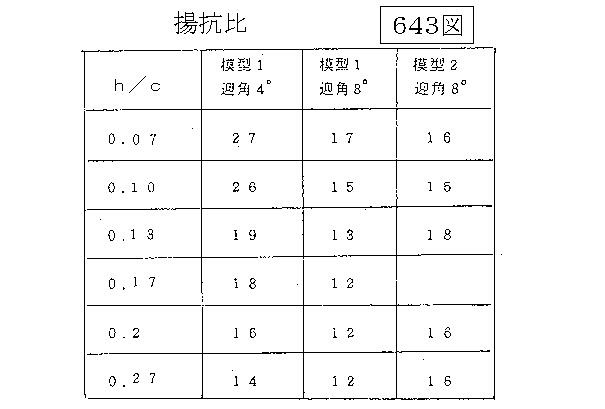
翼の性能の指標である揚力と抗力との比、いわゆる揚抗比を643図に示しました。一般的には迎角4゜の方が大きい値をとります。またhが小さいほど大きくて、最大値は27にも達します。模型2ではh/c = 0.13 あたりに最大が生じています。
トンネルの中の翼は地面と側壁の両方の影響を受けます。この実験ではその両方を分離することはできませんでしたが、両方の効果がはっきりと示されました。
地面は翼下面の圧力を増大し、また下面から上面への巻き上がりを妨げます。地面効果で揚力が20%ほど増加することが確認されました。このことは地中飛行機の設計に大きな貢献をするでしょう。
側壁も翼下面から上面への流れを妨げるので、アスペクト比を大きくしたのと同じ効果を持っています。しかし翼端があまりに側壁と地面との隅に近いと、かえって抗力が増えることになります。単独翼の揚抗比は迎角4゜のとき、翼が地面に近付くにつれて14から27へと増大します。
6.5 風洞実験との比較
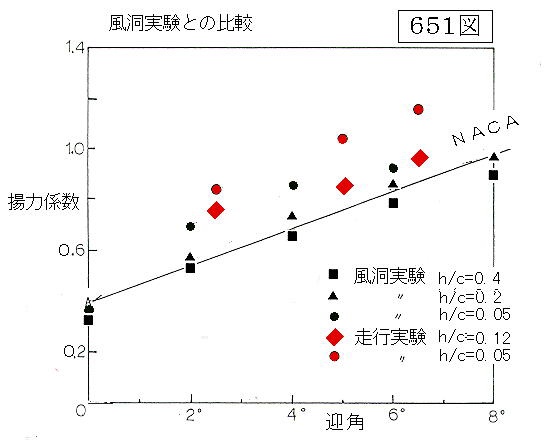
先に行われた風洞実験との比較が651図に示されています。両方にあまり大きな違いはありませんが、地面と側壁の影響は走行実験の方が10%程度大きくなっています。風洞実験のときの問題点は地面の上にできる境界層ですが、h/c=0.05というような地面のすぐ近くでも10%ほどの補正をかければ風洞実験のデイタも使いものになるように見えます。
文献10によりますと地面効果はもっと大きいようですが、それは翼端のギャップが非常に小さいからだと思われます。 NACAの風洞実験の結果は文献15に示されています。
7.TM系飛行実験 7.1 TM−3 模型
地中飛行機に最も適した形態として、同型の主翼を胴体前後に配置した(タンデム)飛行模型の”TM−3(とびもぐら−3)”を設計、製作しました。TM−1とTM−2は試作機で、組織的なテストは行われませんでした。間もなくTM−3の模型が完成して、入間実験場で走行による空力特性の測定を開始しました。実験の期間は1995年9月から1996年3月までです。地面の効果はもとより、側壁の影響も詳しく調べられました。
そののち、この模型を使って実際の飛行実験が行われました。この実験の期間は1995.8から1996.12までです。
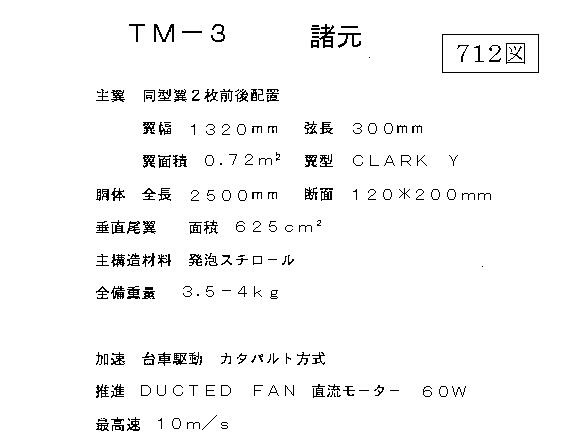
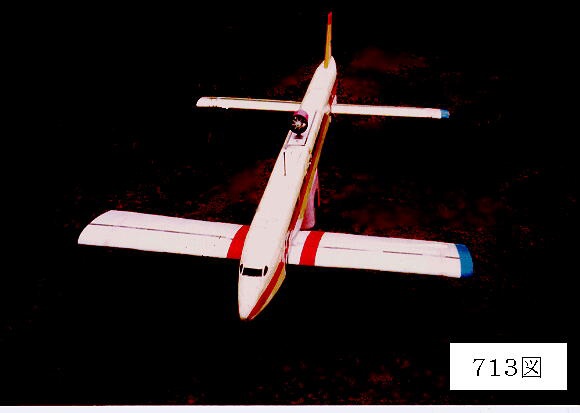
TM−3 の2面図を711図に、諸元を712図に示しました。713図は地上に置かれた模型です。前後に全く同型の主翼があります。両方の主翼の翼型は古典的な CLARK Yで、平面形は最も単純な矩形です。翼弦長= 30 cmで、翼幅=1,320 mmですからアスペクト比は4.4です。前翼の後翼への影響を避けるために、翼間隔をできるだけ大きくとりました。両方の翼の前縁の距離は1,500 mmです。この模型の寸度は実物の1/20を想定していますが、速度が遅いので、離陸を可能にするために翼面積はずっと大きくとられています。この模型はDUCTED FAN(筒で被われたプロペラ)で推進されます。それに直結されたモ−タ−は直流7.2 vが定格のものを、その120%の8.4 vの電池にに接続します。風洞の中で行われた測定によれば、この条件でのFANの推力は ほとんど風速に無関係に、2.5N(0.25 kgf)です。この値は機速9.5 m/sでの抗力とほぼ等しいのでこの速度での等速、水平飛行に十分です。力を測定する実験ではFANは休止しています。

模型は台車の上に乗せられてトンネルの中を走行し、空気力が測定されます。走路や天秤の詳細は5章と6章に述べられています。
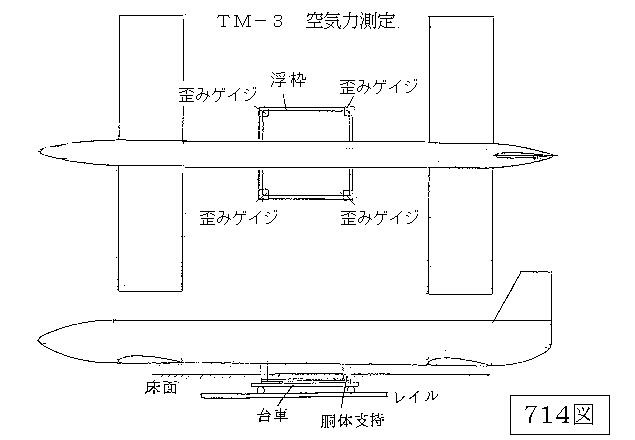
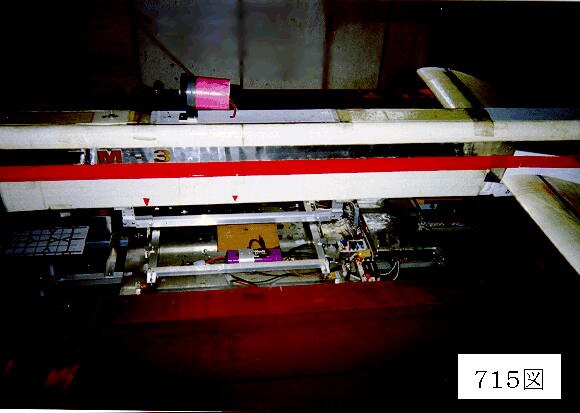
歪みゲイジはいつも模型の重さを受けており、揚力の発生でそれが緩和される形になっています。速度を調節して模型が浮き上がらない範囲で測定を行いました。714図は天秤の上に乗った模型の姿です。715図は模型を載せて横から見た写真です。
天秤の歪みゲイジブリッジの不平衡電圧は増幅されてから、電圧−周波数変換回路でオ−ディオ周波数に変換されます。走行に先立って、鉛の重りを使って、力と周波数の関係の較正が行われます。走行のときにはその出力信号はVHF帯の搬送波を変調して基地局に伝送されます。基地局では受信した信号を復調して、オ−ディオ信号を得、その周波数をコンピュ−タ−によって測定して、力の値を知ることができます。電波は時に障害を受けることがあり、障害が烈しい時はテイプレコ−ダ−を台車に取り付けて、周波数を記録しておき、実験の最後にプレイバックして力の値を得ます。最後にもう一度、力と周波数の較正を行います。二つの揚力と抗力は別々に測定されます。台車の速度は揚力の大きな時は 7 m/s、揚力の小さいときは 8 m/sです。この速度は想定される実機の速度に比べると1/20で、レイノルズ数は1/400ほどです。
天秤で第1揚力と第2揚力とが測られますので、前翼と後翼の揚力を分離する事が出来ます。 前翼だけの揚力係数を716図に示しました。実線の自由空間で NACAの風洞で行われた実験結果よりわずかに大きい揚力係数の値は地面と側壁の効果によることは明らかです。単独翼の実験結果(6章)も記入されていますが、ほぼ一致しています。
前後翼のいろいろな迎角の組み合わせのときの揚力係数の値を717図に示しました。係数を計算するにあたって、胴体部分を除いて翼だけの面積をとったものが示されています。2つの主翼のうち後翼は前翼の伴流の中にありますが、前翼は独立翼と考えてよいでしょう。前翼の吹き下ろしを受ける後翼の迎角は2.5度ほど大きくとってあります。これで前後のバランスがとれているのが分かります。h/c=0.4と0.05の揚力を比べると地面と側壁効果で約30% の揚力増加が見られます。
抗力は速度 8 m/s で測定されました。振動による誤差が大きいので10回の走行の平均値が取られました。迎角が小さくて抗力の小さい場合は特に誤差が大きいので、測定は前翼迎角 6.5°、後翼迎角 9°の組み合わせだけに限り、高さを変えて測定しました。
測定された抗力を、動圧と2枚の翼面積の和を用いて抗力係数の形にしたものが718図です。いくらかのばらつきが見られます。高度による違いは誤差の範囲内で、単独翼で見出された、低高度での抗力の減少は判然としません。揚力と違って抗力を2つの翼に分割することはできません。色々な高度での揚力係数を用いて、揚力と抗力の比すなわち揚抗比を計算してみました。大雑把にいえば 揚抗比 は 10 − 20 です。従って全備重量が4 kgの模型が定速、水平飛行するのに必要な推力は2 − 4N(0.2 - 0.4 kgf)と見積られます。
地中飛行機は地面効果だけでなく、翼下面から上面への巻き上がりを側壁によって抑えて揚力を増加する効果が期待されます。それを見るために、翼端と側壁との間隔を変えた実験を行いました。前後翼の両端に同じ翼型で幅 50 mmの翼を付け加えて揚力を測定しました。
最初の状態では翼端と側壁との間隔は90 mmです。そのときは CL(前翼)=1.06、 CL(後翼)=1.13
で、翼端に小翼を付加すると、間隔は40 mmとなり、そのとき、翼の全面積を用いた揚力係数は、
CL(前翼)=1.19、 CL(後翼)=1.29
となります。側壁の影響は明らかです。
翼に端板をとりつけた実験も行いました。上記の翼に地面から 5mmほどの高さまでを被う端板をつけると、
CL(前翼)=1.28 , CL(後翼)=1.40
となり,翼端板の影響もはっきりと示されました。
通常の飛行機で重要な縦揺れモ−メントはタンデム翼のTM−3では別の形で現れます。単独翼での空力中心の移動は縦安定には殆ど問題でなく、胴体の傾きの変化によって前翼と後翼の揚力がどのような値になるかということがトリム(縦)安定にとって重要です。
717図で見られるように、前後の翼の揚力をほぼ等しくするためには、後翼は前翼より大きな迎角をとる必要があります。これは前翼の吹き下ろしの影響です。今の前後翼の配置では同じ迎角の時には後翼の揚力は約10%少ないのです。同じ揚力を得るためには、後翼の迎角を2 - 2.5°増やす必要があることが分かりました。後翼に及ぼす前翼の吹き下ろしの影響を和らげるために後翼を少し高くすることも考えられます。しかしそのときは後翼が地面から遠くなるので有利ではありません。前後の翼の揚力を等しくするためには、やはり後翼の迎角を大きくとる必要があります。
地面近くの飛行の時は高度が下がると、地面効果によって揚力が増加し、高度が上がると揚力が減ります。それによって、選ばれた高度が自動的に維持されることになります。
一方、迎角が変化したとき、それを元に戻すのが縦安定です。この二枚翼機は前後の翼は常に同じだけ迎角を変えますが、地面に近付いた方の翼の揚力増加が大きいので、それが縦安定の原因となります。719図はその関係を示しています。
模型全体の迎角を変えて、前後翼の揚力を測定しました。前後翼の迎角が、各6°、8°のとき、重心まわりのモ−メントは、
迎角=−1° (頭下げ)で 頭上げモ−メント係数= 0.22
迎角=1° (頭上げ)で 頭上げモ−メント係数=−0.42(頭下げ)
となります。モ−メント係数を計算するときの長さは前後翼の前縁の間隔をとりました。両方の係数は等しくはありませんが、縦の安定が保たれることは明らかです。
7.2 TM−3 飛行実験
模型を載せた台車を加速して、あるスピ−ドに達したときプロペラを回して離陸、飛行する実験を行いました。飛行するために基地局から出される指令と、模型からの情報の取得はすべてパソコンで制御されています。飛行条件としては、機体重量を4 kgとして揚力係数が0.95なら、9.6 m/sで離陸する筈です。その速度で抗力係数を0.07とすると抗力は2.9Nで、推力3Nのプロペラなら十分に等速飛行が可能です。721図は制御系の全体を示しています。
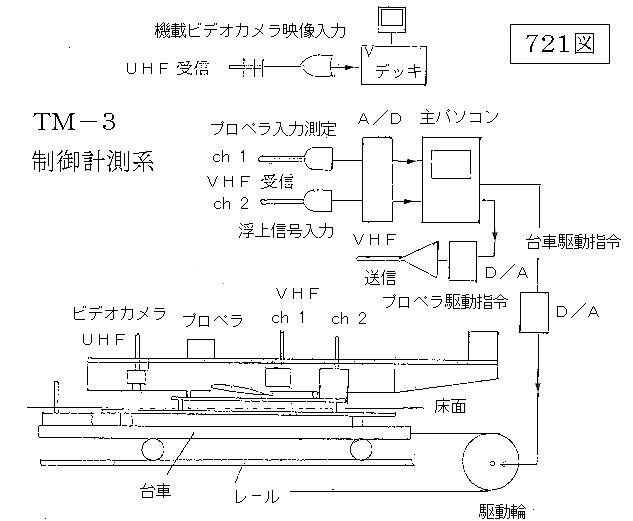
主パソコンからの指令としてまず台車を駆動するサ−ボモ−タ−に 0 - 5 v の電圧がD/Aコンバ−タ−を通して与えられます。台車の速度が指定の値になった時にVHF帯の無線によってプロペラにスタ−トの指令が与えられます。ch 1によって実際のプロペラへの入力電圧が模型から基地局へ報告されます。離陸チェックの時は台車に取り付けられたスイッチの状態がch 2によって送信されます。それらとは全く無関係に、胴体の下面の穴から地面を監視している小型ビデオカメラの映像がUHF帯の信号として送られてきます。
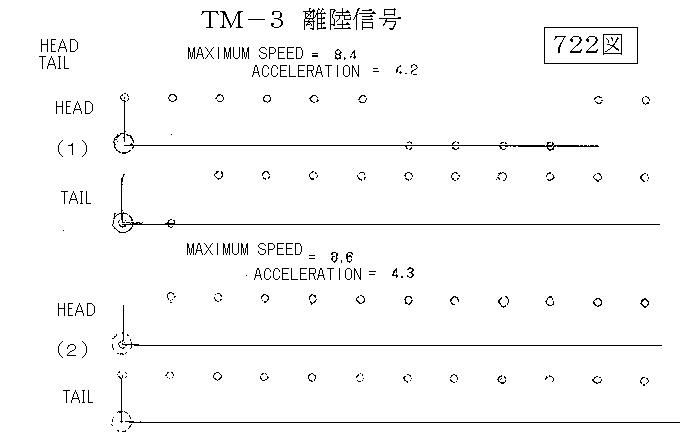
最初はTM−3の台車からの離陸の有様を調べました。台車に模型を載せて、離陸に充分な速度にまで加速して、プロペラを回します。いわゆるカタパルト型の離陸です。このようにする理由はトンネルが50 m と短く、プロペラで加速していると、加速に距離をとられて、飛行のための距離がなくなってしまうからです。離陸した後にも模型とほぼ同じ速度で台車を走らせて、台車の上に着陸するようにしてあります。台車と模型は緩い糸で結ばれています。それによって模型がとんでもない所に飛んで行くことなく、離陸の有様についての情報を得ることができました。台車に飛行機を据え付ける部分の前と後ろにスイッチをとりつけました。飛行機が離陸したらスイッチが切れて、そのことをVHF帯の無線によって基地局に送信します。両方のスイッチのどちらが先に切れたかを調べれば、どのような形で離陸したかが分かります。理想的なのは両方が同時に切れて、水平な姿勢で離陸することです。重心が二つの翼の1/4弦長点の中点にあったとき、先翼と後翼の揚力を等しくする必要があります。後翼は前翼の吹き下ろしの中にあるので、前翼の迎角 が6.5゜、後翼の迎角 が9゜という組合せを得ました。また、適切な離陸速度も見出されました。その値はさきに走行実験で得られたものと一致しています。722図はパソコンに受信された離陸信号の一例です。横軸は時間です。赤丸は着地状態、青丸は離陸状態を表しています。(1)はやや不安定な浮上で、まず頭が離陸しそのあとで尾部が離陸しましたが、また頭部が着陸しています。(2)は完全な浮上飛行です。
紐の付かない飛行が自由飛行です。模型を載せた台車は離陸に必要な速度まで加速され、模型を放り出してから急減速して停止します。模型は台車が最大速度になったとき、プロペラモ−タ−を始動して離陸し、ほぼ等速度飛行をして、きめられた時間ののち、プロペラを停止して着陸します。飛行プログラムでは、台車の最高速度と、離陸地点と、飛行継続時間とが指定できます。標準的な値はそれぞれ、9.6 m/s,20 m,3秒です。台車の運行と、予想される飛行の経路が723図です。横軸は出発点からの距離で、縦軸はスピ−ドです。実線は台車の速度を、破線は飛行状況を示しています。今のところ何も操縦ができないので、側壁に接触することが心配されました。しかし垂直尾翼に付けた小さなタブを調節することによって、ほぼまっすぐに飛ぶようになりました。724図はTM−3がまさに出発しようというところです。模型は台車の上に乗っており、作業をしている3人のスタッフが見えます。

725図は飛んでいるTM−3を横から見た全景です。

飛行条件の一つは離陸の時の地面からの高さです。快調な飛行をするには地面に近いほど良いようです。あまり高いところで離陸すると、いったん下降します。このとき頭が下がると、揚力が減って、引き起こすことができず、着地してしまうことが多いようです。
もう一つの重要な条件は重心の位置です。重心位置を変える為に70 gの鉛を胴体のいろいろな所に張り付けました。重心位置の測定には揚力を測る天秤を利用しました。その結果は常識的で、重心が前にあると、頭を突っ込んで着地してしまう。一方、重心が後ろにあると、頭を上げて急上昇し、失速してしまいます。現在の両翼の迎角の組合せでは重心が両翼の1/4弦長点の中点にあるのが最適であることが分かりました。
いろいろな角度から飛行状況のビデオがとられました。横から撮られた726図は離陸の有様です。わずかに台車が見えます。727図は着地したところです。模型には脚が無いので、着陸したら胴体と翼で床の上を滑ることになります。それを停止させるのが着陸端の柔らかいクッションです。728図は着地端から撮られた正面映像です。

飛行中の飛行機の軌跡を調べるために前翼付近の胴体に小さなテレビカメラをとりつけました。このカメラは胴体下面の穴から床面の中央の幅40 mmの溝を監視しており、その映像を短いアンテナを通じて、UHFの電波で基地局に実時間で送ってきます。基地ではそれをビデオテイプにとっておいて、あとで解析します。飛行機の床からの高さによって溝の映像の大きさが変わり、飛行機の横方向の位置によっても映像が変化します。予めそれらを較正しておいて、実際の値を計算します。
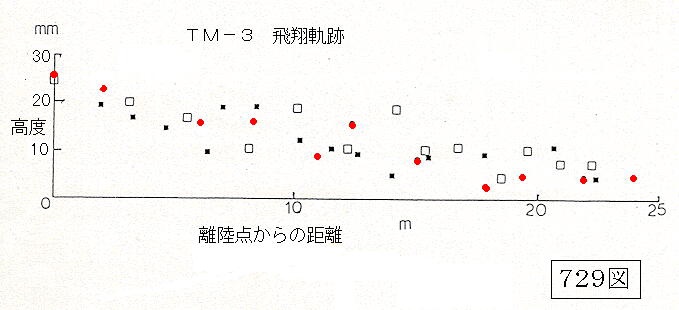
729図では色々な記号で示された飛行モ−ドについて、横軸に飛行距離、縦軸に床からの高さをとってあります。それを見ると離陸直後にやや沈んでから、ほぼ水平飛行に移るようです。高度曲線は波を打っていますが、横軸の縮尺を考えるとこれは実に緩やかな上下動です。この上下動は地面効果による安定性を物語っているものと思われます。すなわち床に近ずくと、揚力が増えて上昇し、遠ざかると下降するのです。離陸してからプロペラを駆動している時間はプログラムによって、2.5秒に制限されているので、離陸速度9.6 m/sのときの推力のある飛行距離はほぼ24 m です。これらの例では飛行の間の横方向のぶれは30 mm程度以下になっています。飛行距離が25 mほどであることを考えるとこのぶれは驚くほどの小ささです。これは先に述べたような、翼が側壁に近づいたときに翼の揚力が増えて、横滑りによって側壁から離そうとする効果によるものと考えられます。このような直線飛行を実現するには、重心位置、出発のときの姿勢、垂直尾翼にとりつけられた小さなタブ、プロペラの取り付け方向などの微妙な調整が必要です。
7.3 流れの観察
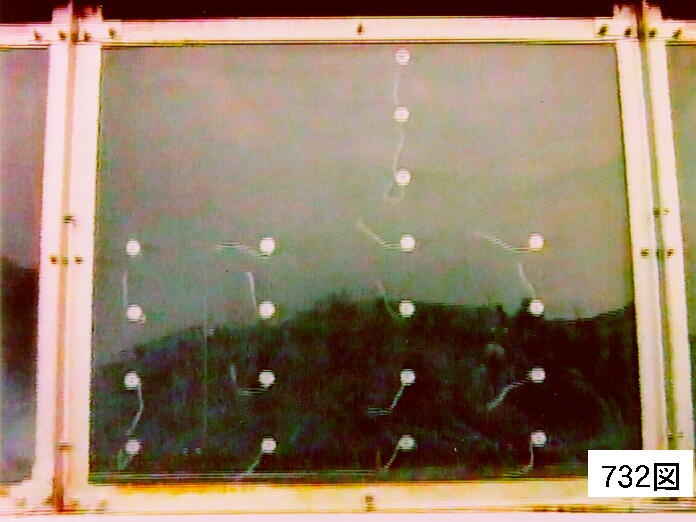
飛行機がトンネルの中を飛行するとき、どのような流れを作るかということは興味があります。営業運転のとき先行する飛行機の後流が残っていて、その中につぎの飛行機が突入することになると大変です。そこで流れを見るために側壁の15ケ所にタフト(毛糸)を貼っておき、飛行機の通過によってどのような流れができるかを、ビデオカメラで撮影して観察しました。731図はタフトと進入してきた飛行機です。732図は模型が通り過ぎた後のある瞬間のタフトの有様です。それによるとタフトは激しく上方へ吹き上げられ、いわゆる壁噴流となっています。これは翼の下面の圧力が高く、上面の圧力が低いことを考えると当然です。特徴としては、強い壁噴流は翼が通過して少し経ってから起きることです。これは飛行によって上昇流がひきずられる形になっているからでしょう。

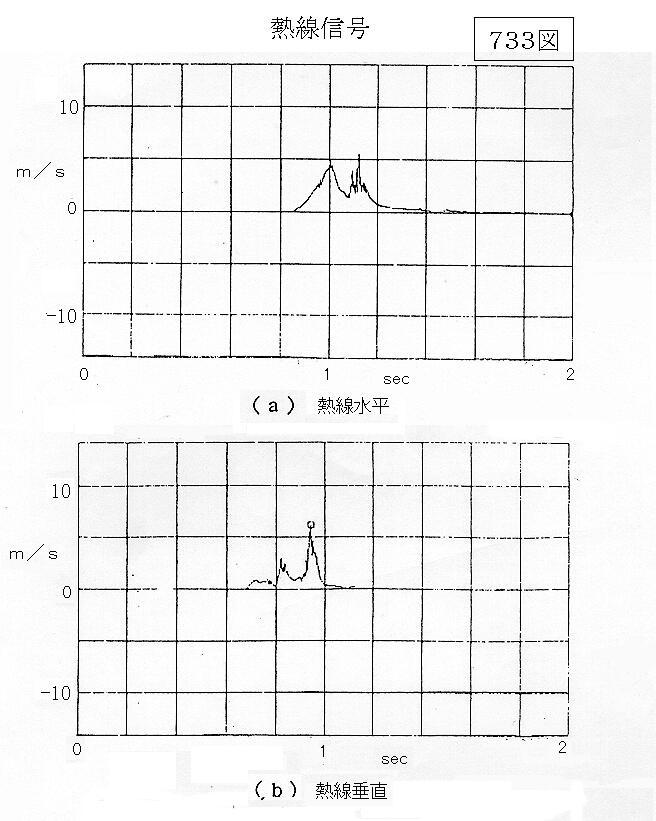
熱線風速計による風速の測定も行われました。飛行機のまわりの流れは非常に複雑で、ある点での流れの3成分を分離して測定することは易しくありません。そこで熱線を水平に置いたときと、垂直に置いたときの風速の記録をしました。熱線は4チャンネルで、2チャンネルは壁のそばの、あとの2チャンネルは胴体のそばの流れを見るようにしました。熱線が水平のときは速度成分としてvとw,垂直のときはuとvを感じることになります(uは飛行方向、wは 鉛直方向)。測定された記録の一部を733図に示しました。このとき熱線支持棒は側壁に垂直に、壁から50 mm、飛行機の翼端からも 50 mm の位置にあります。飛行機の速度は 8 m/sです。 飛行機の通過にともなう風はほぼ0.3秒続いています。最大風速は熱線が垂直の場合に 6.2 m/s,水平なときに 4.8 m/sです。大ざっぱに言えば、垂直熱線は飛行機に引きずられる流れを、水平熱線は翼の下面から上面への吹上げを示しています。いずれも飛行速度に比べて決して小さくはありません。双方にピ−クが二つあるのは2枚の主翼の通過に対応しているのでしょう。0.3秒という時間は長さにすると 2.4 m であって、飛行機の胴体の長さにほぼ等しいのです。飛行機が通過した後に流れがどれほどの時間残っているかということも調べられましたが、この条件ではほぼ11秒でした。実機のようにレイノルズ数が大きいとき減衰時間がどうなるかはよく分かりませんが、10倍とすれば2分ほどになります。実際の飛行間隔は5分以下になることはありませんので十分に安全なことが実証されたことになります。
この測定には航空宇宙技術研究所の高木正平氏の全面的な協力を得ました。
7.4 TM−4 模型
前後に同じ大きさの主翼を持つたタンデム翼方式が地中飛行機として好適な性能を示すことはTM−3の飛行実験で分かりました。今度は前後両方の翼にエルロン(補助翼)を付けてそれを遠隔操作することによって、模型の姿勢と高度を実時間で制御して色々なパタンの飛行をさせることを試みました。実験は1997年初頭から、その年いっぱい続きました。
作られた模型の2面図が741図です。全長が2.2 m、翼幅が1.32 mです。これは実物の1/15から1/20に相当します。主材料は発泡スチロ−ルです。翼の面積は前後とも各3,600 cm2で、エルロン面積は左右おのおの150 cm2です。方向安定のために方向舵のついた垂直尾翼があります。DUCTED FANのプロペラが胴体の上にとりつけられています。設計諸元は742図です。電池、制御機構などを含む全備重量は3.5 kgです。色々な角度から撮られた写真が743−745図です。前後翼のエルロンがはっきりと見られます。これがとびもぐら−4(TM−4)です。
模型の空気学的特性が走行実験で測定されました。前翼の吹き下ろしの影響で後翼の実効迎角が減りますから後翼の迎角を前翼より2゜〜3゜くらい大きくすると、前後の釣り合いがとれます。前翼と後翼の迎角をそれぞれ5゜と7.5゜に選びました。前後のエルロンの角度を色々に変えて測られた揚力係数が746図に示されています。ここでは翼面積として前後おのおのの面積をとってあります。エルロンの操作で前翼と後翼の揚力が10%程増減できて、頭を上げたり、下げたりできることがはっきりしました。
全機の抗力も測られました。誤差が10%を越えていますので、地面からの高さによる変化ははっきりしませんが、抗力係数はほぼ0.15から0.2の間です。係数を作る翼面積は前後の翼の和をとっています。これを揚力と一緒に考えると揚力抗力比はほぼ11から15くらいになることが分かります。
7.5 TM−4 飛行実験
市販の模型飛行機用の制御装置に回路を付け加えて、コンピュ−タ−による制御ができるようにしました。コンピュ−タ−の中のデ−タをD/A変換して、アナログにした出力によって遠隔操作で模型のプロペラと、前後翼のエルロンが別々に制御できます。コンピュ−タ−・プログラムに与えられた変数の値によっていろいろな飛行をします。TM−3の飛行で見たように、胴体の前か、後ろの翼が地面に近ずくと、揚力が増えて機を水平にするようなモ−メントが発生します。これがタンデム型の持つ靜安定の特徴です。
751図は飛行に出発するところの写真です。
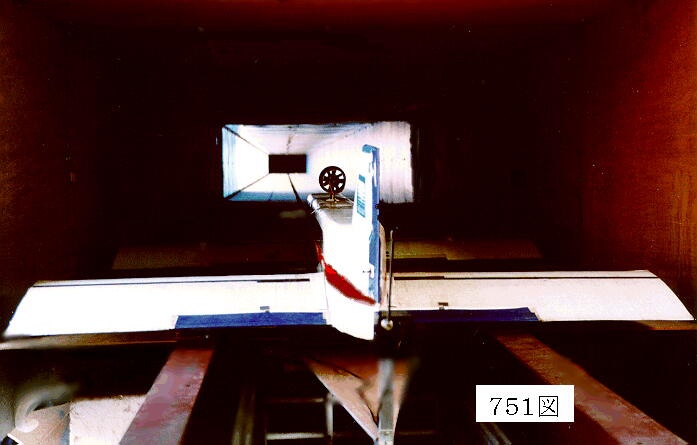
台車に模型を載せて752図のような走行曲線で加速し、最高速になり、台車が減速に入った瞬間にプロペラに始動の指令を与えます。それによって模型は離陸します。エルロンの方は最高速度に達する前に離陸しないように、台車の上に乗っている時には前翼のエルロン角を負にして頭下げのモ−メントを与えておきます。離陸したらすぐエルロンの迎角をゼロにします。そのあとでエルロンを色々に操作します。左右のエルロンはいつも一緒に操作されています。それは機体にロ−ルを与える必要が無いからです。あまり速度が小さいとすぐ突っ込んで着地してしまいます。反対にあまり速度が大きいと高度が上がりすぎて天井にぶつかってしまいます。結果として最も快適な速度は8.8 m/sであることが分かりました。
753〜755図は飛行を横から撮った例です。753図では模型は頭を下げてまもなく着地しそうです。754図は地面効果を利用したほぼ理想的な飛行です。755図は頭を上げすぎて失速状態になっています。

トンネルの側壁には高さと距離を示すマ−クが貼り付けてありますから、横から撮ったビデオの映像を解析することによって速度と高度の飛翔軌跡を調べることができます。空気抗力に比べてプロペラの推力が少し不足していますので減速度がかかります。飛行軌跡の結果が756図です。計算による離陸地点はX=22 mあたりです。離陸の時の後縁の高度は40 mmですが、舞い上がりがあり、33 mあたりの早い接地がありますが40 m近くまでほとんど同じ高度を保った理想的な飛行があります。プログラムされたエルロンだけの操作でこの程度の飛行ができますから、もっと色々な計測と制御手段を持つ実際の飛行機なら十分に良い飛行が期待できます。
タンデム翼の飛行機でエルロンだけを操作しても満足すべき飛行を実現することができました。これは縮尺が1/20という小さいものですが、もっと色々な制御機構を持つ実機では十分な性能と安全性を確保できると思われます。 大型トンネルを前提としたタンデム翼模型の実験をここでひとまず終わって、次にはひらめ型(TH−1)の実験に移りました。
7.6 TM−5模型
ひらめ型の一枚翼模型は自律的縦安定が得られないので、タンデム翼で、アスペクト比の小さい模型をもう一度テストすることにしました。これは直径が14 m程度のトンネルの中の1/10模型に相当します。模型の完成は1999年初頭です。模型諸元が761図で、2面図が762図です。

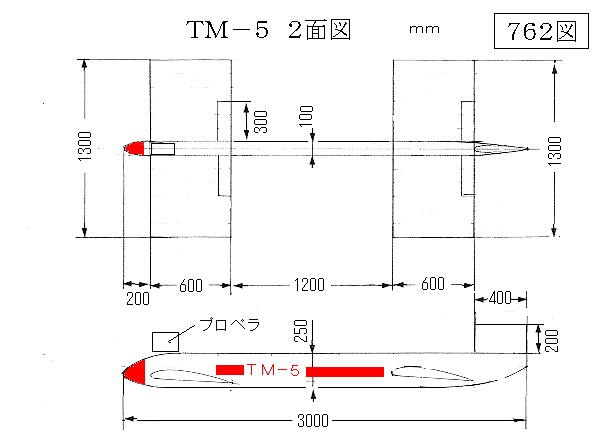
構造の主材料は、主翼と尾翼が発泡スティロ−ルで、胴体がバルサ材です。後翼には前翼の吹き下ろしが影響すると思われますので、後翼の取り付けは胴体を水平にしたとき10 mmほど上に上げてあります。両方の翼のアスペクト比は、胴体部分も含んで2.2ほどです。推力を発生するDUCTED FANと電池とをできるだけ前の方に持っていきましたが、全機の重心は前翼と後翼の1/4弦長の間の中点から後方50 mmほどになりました。もし二つの翼の揚力が等しくて、揚力が1/4弦長点に働いているとすれば、少し頭上げモ−メントが作られることになります。同じようなタンデム機のTM−4に比べると翼弦長が2倍で、アスペクト比が1/2になりました。重量は40%ほど増えています。これらのことで性能がどのように変化するのかを確認することが目的です。
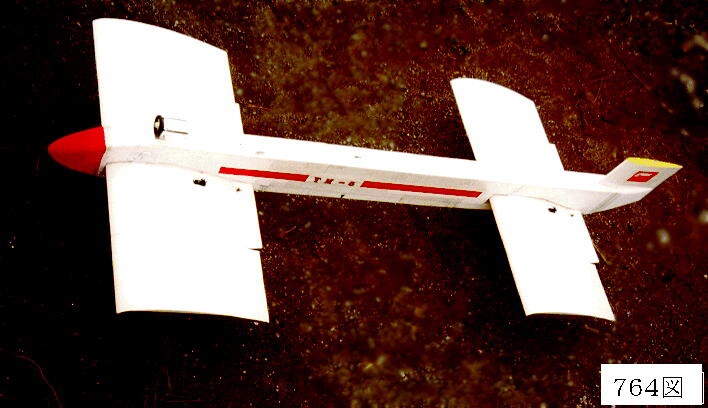
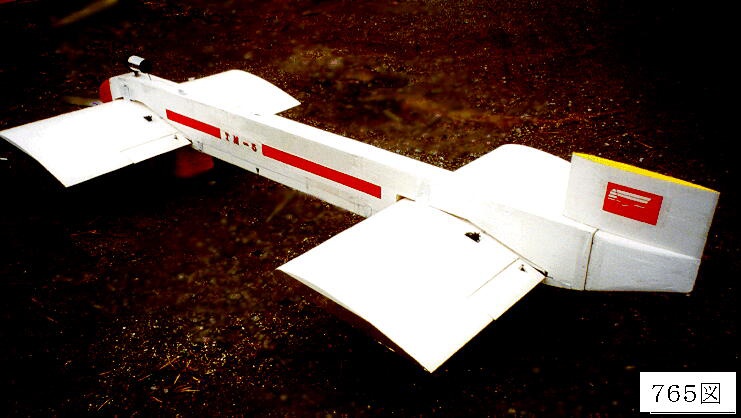
操縦のために前後翼のおのおのにエルロンがとりつけられており、それが基地局からの無線指令で動かせるようになっています。地上に置かれた模型の写真が763−765図です。763図は前方から、764図は側方から、765図は後方からの撮影です。

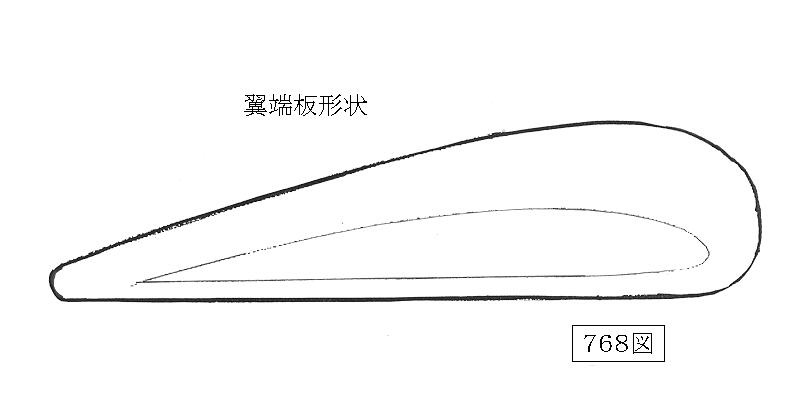
翼端に垂直な翼端板を付け加えた効果を見るために、TM−5の前後翼に翼端板をつけた実験を行いました。766図は翼端板付きの模型を横から撮ったもの、767図はトンネルの中にセットされた模型を正面から撮ったものです。翼端板と翼の関係は768図に示されています。翼端板は翼断面のほぼ2倍の面積となっています。


速度6 m/sで走行によって全機の揚力と抗力が測定されました。エルロン角をゼロとして、前翼と後翼との迎角を 4゜と 4゜にしたときの地面からの高さを変えたときの揚力係数の実測結果が769図です。
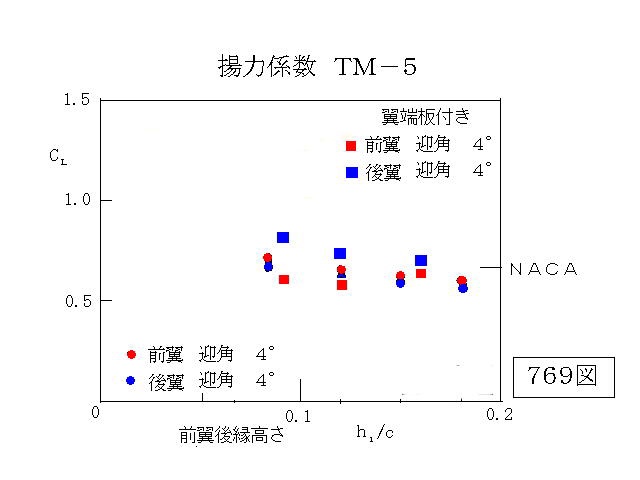
おのおのの翼の揚力は1/4弦長点に働くものと仮定してあります。前後翼の揚力はほとんど等しいのですが、わずかに前翼の方が大きいようです。これを見ると後翼に対する前翼の吹き下ろしの影響はこれくらい離れていると、余り大きくないようです。翼端板が付加されたときには後翼の揚力の方が僅かに大きくなっています。NACAで行われた風洞実験の結果が示されてあります。このようにアスペクト比の小さい翼でも揚力はひどく小さくはなりません。両方の翼の揚力を加えると、速度が9.2 m/sあたりで浮上する計算になります。
抗力の測定結果は、迎角は前翼4゜と後翼4゜で、h1/c=0.14でCD=0.11であり,h1/c=0.1でCD=0.105で、高さによる差はありません。翼端板付きのときは、これも高度には無関係です。このとき抗力係数は0.68 − 0.7で、30 % ほど小さくなっています。これが翼下面から上面への巻き上がりを防ぐ翼端板の効果です。
エルロンを前後翼とも+10゜にとるとCD=0.12で,−10゜にとると CD=0.07です。エルロンの角度による変化ははっきりとしています。 全機の迎角が変わったときにそれを復元するようなピッチングモ−メントが発生するかどうかを調べました。その結果は
胴体迎角 前翼高さ 後翼高さ 前翼揚力係数 後翼揚力係数 0゜ 48 mm 58 mm 0.67 0.655
−2.1゜ 63 mm 138 mm 0.48 0.35
1.7゜ 94 mm 50 mm 0.72 0.90
これを見ると迎角が負、すなわち頭が下がると、CL1>CL2で復元しますし、頭が上がるとCL1<CL2で、これも復元に働らくことが分かります。
操縦のために必要な縦揺れモ−メントを発生させるためにエルロン角を色々に変えて、前翼揚力と後翼揚力の実測結果が下表に示されています。
前エルロン角 後エルロン角 前翼揚力係数 後翼揚力係数
−5゜ −5゜ 0.60 0.53
−5゜ +5゜ 0.54 0.69
0 0 0.66 0.65
0 +5 0.59 0.64
+5゚ −5゜ 0.66 0.49
+5゚ +5゚ 0.70 0.73
前翼迎角 = 3゚ 後翼迎角 = 3゚ 前翼高さ= 50 mm 後翼高さ = 60 mm
これを見るとエルロン角が±5゜の範囲で頭上げ、下げのモ−メントを発生させることができることを示しています。
7.7 TM−5飛行実験
基礎的な空気力学的性能の測定が終わりましたので、模型の飛行実験を行いました。その期間は1999年5月から8月までです。
まず離陸速度が確かめられました。天秤での測定値からの見積りは9.2 m/sでしたが、実際には9.3 m/sで離陸しました。でき上った模型の重心は前後翼の空力中心点から後方に40 mmで、揚力と完全には一致していませんが、それによる頭上げの効果はあまり大きくありません。機速を上げすぎると高度が高くなって、天井に接触することがありますので、スピ−ドは 9.5 m/s以下に抑える必要がありました。推進力はDUCTED FAN から得られました。天秤実験によると速度が9.2 m/s の時の全機抗力は4.2 N(420 grf)です。ファンの推力はほぼ2.5Nですから、飛行は減速飛行で、離陸から2秒後、すなわちほぼ20 m飛行した時のスピ−ドは8.5 m/sとなります。
飛行はパソコンからの指令によるプログラム飛行です。最初の20 mが加速区間で、そこで台車が最高速度になったところで、プロペラを始動し、エルロンの角度を取って、台車から離陸します。その1秒後にもう一度エルロンを操作して高度を維持します。両方のエルロン角をゼロにして飛行しても縦安定は保たれます。前翼の後縁の高さが 100 mm (c/h = 0.16)を越えるほど高くなると、方向とロ−ルの不安定が発生し、ときに翼端が側壁に接触する事があります。これは明らかに地面効果の消滅によるものです。
飛行を横から撮ったものが771−774図です。トンネルの側壁に貼られた小さな点は左右間隔が 30 cm、上下間隔が10 cmにとられています。胴体の先端は赤く、胴体の前縁付近の上に白く見えるのがファンです。その30 cmほど後ろのほんのり赤い点はプロペラが回っていることを示す発光ダイオ−ドです。771図では地面のごく近くを水平飛行しています。772図ではやや頭を下げて突っ込んでいますが、高度はほぼ理想的です。逆に773図では頭を上げて上昇しています。774図ではもっとひどく上昇して、機体は右に傾き、翼の下面が見えます。地面効果を失って、ロ−ル不安定になっていることがはっきりと分かります。




飛行を正面から撮った写真が775図です。

トンネルのほぼ中央を水平に飛んでいます。よく見ると機体底面と地面との間がわずかに空いていることが分かります。すなわち地面効果を利用した低空飛行になっています。

翼端板を取り付けた飛行の側面写真が776−778図に示されています。776図はほぼ水平な、地面効果を利用した、理想に近い飛行です。777図ではやや頭を上げていますが、悪くありません。778図では上昇しすぎて天井に近付いています。適切な遠隔操作によって良い飛行が得られます。しかし翼端板のはっきりした効果は方向安定の改善です。すなわち飛行中に側壁に接触しないことです。これは翼端板と側壁との間の水平方向の地面効果によっています。定量的に表現することが出来ませんが、50回ほどの飛行で側壁に軽く接触したのは2,3回でした。これは翼端板の無いときの1/4程度です。
7.8 TM−6
主翼が一枚で、胴体の先端と,後端とに小さい前翼と尾翼を持つ、いわゆる3翼飛行機は細かい制御に向いていると考えられます。そこで3面図が781図のような模型を作りました。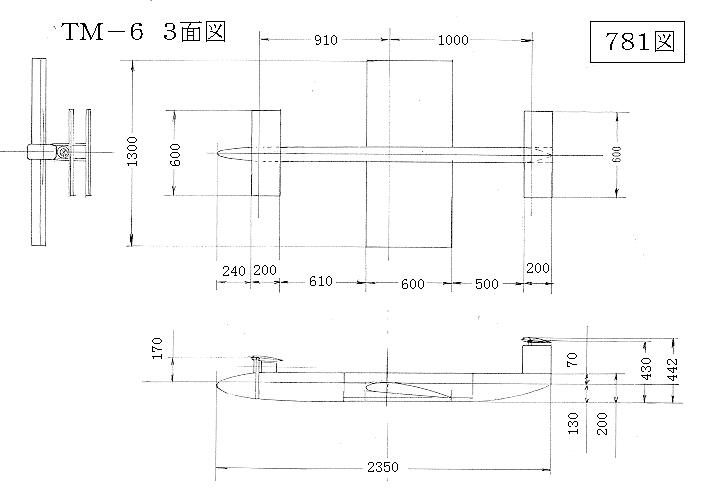
これをTM−6と命名します。模型を色々な角度から撮った写真が782,783,784図です。前後の水平翼は全体が迎角を変えられるようになっています。垂直尾翼は2枚で、水平尾翼を支えていて、固定されています。全備重量は4.3 kgで、重心の位置は主翼の1/4弦長点の23 mm前方です。主翼の取り付け迎角は6゜です。走行実験による揚力係数は 前後翼迎角=0で0.92 前後翼迎角=8゜で 0.98です。これは9 m/sで十分に離陸する値であり、頭上げ、下げの制御が出来ることを物語っています。
色々に条件を変えた飛行実験によって安定な飛行の条件を見出す努力をしました。離陸してからまもなく着地する場合は揚力が不足しています。またある条件では高く上がりすぎて。横揺れ不安定を発生して、側壁に接触する場合があります。その中間の条件を採用すれば快適な飛行をするはずですが、必ずしもそうはなりません。これが縦安定が得られないということでしょう。飛行を横から撮った写真の785図はまずまずで、786図、787図は少し頭をあげています。788図はいわゆる舞い上がりで、完全に安定を失っています。
7.9 TM−6改
TM−6の前翼と後翼は主翼より高く取り付けられていて、地面効果が働きません。飛行が十分に安定しないのはそのせいであろう、ということで、TM−6と殆ど同じで、前翼と後翼を地面に近い、低いところにとりつけた模型を作りました。これをTM−6改と名付けました。設計諸元はTM−6と殆ど同じで、3面図が791図です。前後の水平翼はやはり全体の迎角が変えられるようになっています。792,793,794図が写真です。



トンネル内の走行によって模型の揚力が測定されました。主翼の取り付け角は6゜です。測定の結果が795図です。揚力係数はほぼ0.8です。 台車に載せて飛行を試みました。予想通り9.4 m/sで離陸しました。796,797,798図が飛行を横から撮った写真です。いずれも低い高度の、理想に近い飛行です。10回ほどの色々な条件の飛行で舞い上がる事は1回もありませんでした。定量的に言うことは出来ませんが、前後翼が高いTM−6に比べて格段の安定飛行でした。これは明らかに前後の小翼に働く地面効果です。

8.TH系飛行実験
地中飛行機の飛ぶトンネルの直径を小さくすれば、建設費が節約できて、実現の可能性が大きくなります。しかし翼幅の小さい飛行機で必要な翼面積を確保するためには翼弦長を大きくしなければなりません。そうすれば必然的にアスペクト比が1の程度に小さくなります。これは普通の飛行機では許し難いことですが、地中飛行機では地面効果と側壁効果で翼端での巻き上がりが抑えられるので実効アスペクト比が大きくなることが期待されます。一方では弦長が大きいので翼が厚くなり、翼の中に乗客を収容する可能性が出てきます。このことは2.4に述べられています。
アスペクト比が1の翼だけの走行実験と、その翼を持つ全機模型の飛行実験をすることにしました。実施した期日は1998年1月から1999年3月までです。
8.1 単独翼の性能
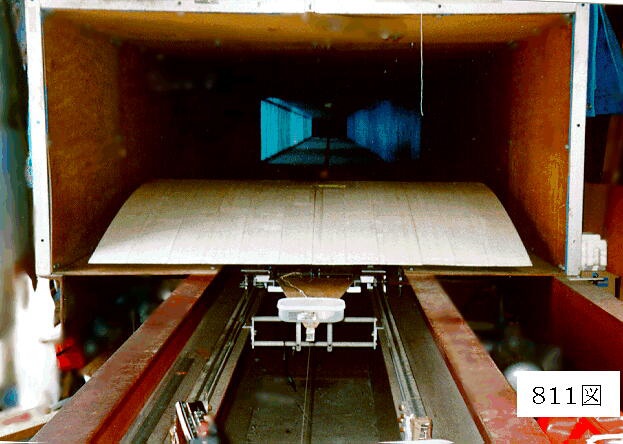
翼型は古典的なアメリカのNACAの CLARK Yです。実験のトンネルの横幅が1.5 mですので、翼幅と翼弦長とを1.3 mにしました。アスペクト比は1です。翼端と側壁の間隔は両側とも10 cmです。測定のための走行速度は6〜7.5 m/sですから、翼弦長を使ったレイノルズ数は5.2 x 106 ほどです。翼は発泡スティロールの整形で作られていて、その表面はプラスティックのフィルムで覆われています。総重量はほぼ3.5 kgです。
811図は走行台車の上の天秤にとりつけられた単独翼を後方から見た写真です。迎角と地面からの高さが調節されます。翼の高さの定義は地面から翼の後縁までです。迎角としては2゜から6゜まで、高さは20 mmから60 mmまで変えられました。h/cの値は0.015から0.046までです。
812図は走行中の翼を側方から見たものです。揚力と抗力は完全には分離されていません。
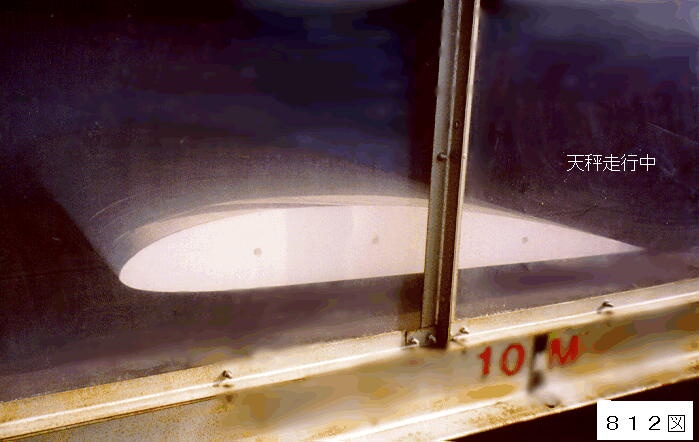
揚力におよぼす抗力の影響は無視できますが、抗力に対して揚力は大きいので抗力測定に揚力の影響が大きくなり、測定の精度が落ちます。揚力の影響は較正されて、補正が行われていますが、補正量は抗力の5〜10%に達します。誤差のもう一つの原因は走行による翼の振動です。台車が加速され、一定速度に移るまでの加速度の変化がその原因で、振動は翼が高くなるほど強くなり、精度を悪くします。第1と第2揚力については各5回、抗力については10回の走行、測定が行われ、その平均がとられました。
測定された揚力係数が813図に示されています。3種類の迎角ともh/cが小さくなるにつれて揚力係数が大きくなって、地面効果がはっきりと見られます。レイノルズ数が違いますから決定的なことは言えませんが、地面効果の小さいところではNACAで行われたアスペクト比6の結果ほぼ一致しています。文献16は水面の上で行われたアスペクト比が1の実験です。結果としては地面効果で揚力係数が2倍にもなっていますが、これは少し大きすぎるように思われます。
抗力係数が814図に示されています。測定誤差はおそらく10〜20%で、点の散りが大きくなっています。これにははっきりした地面効果は見られません。揚力対抗力比は精密には見積れませんが,迎角6.5゜でほぼ10,4.5゜で13, 2.5゜で20くらいになっています。迎角が大きくなるにつれてNACAの結果より大きな抗力になっています。抗力についてはレイノルズ数の影響が大きいので直接の比較には意味がありません。
8.2 TH−1模型
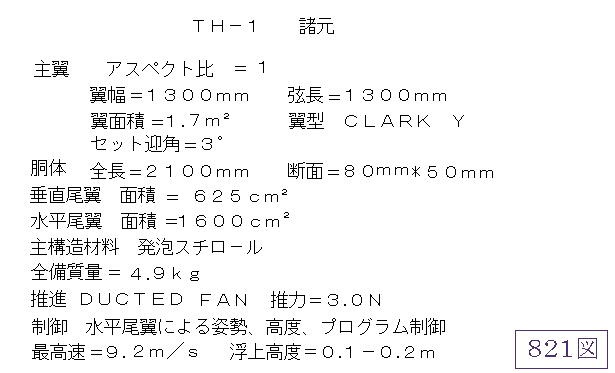
細い胴体の左右にアスペクト比の小さい翼をとりつけ、方向安定のための垂直尾翼と、姿勢を制御するための水平尾翼をとりつけました。垂直尾翼は固定で、水平尾翼は翼全体の迎え角が変えられるようになっています。胴体には電池、制御系、プロペラを取り付けてあります。プロペラはいわゆるDUCTED FANで、推力はほぼ2.5N(250 grf)です。それらをどのように配置するかによって重心の位置が決まります。この重心位置は安定飛行に大きな影響を持っています。我々は重心が揚力の着力点より僅かに後方にくるようにしました。そうすれば尾翼の迎え角を変えることによって全機の姿勢と高度を変えることができます。
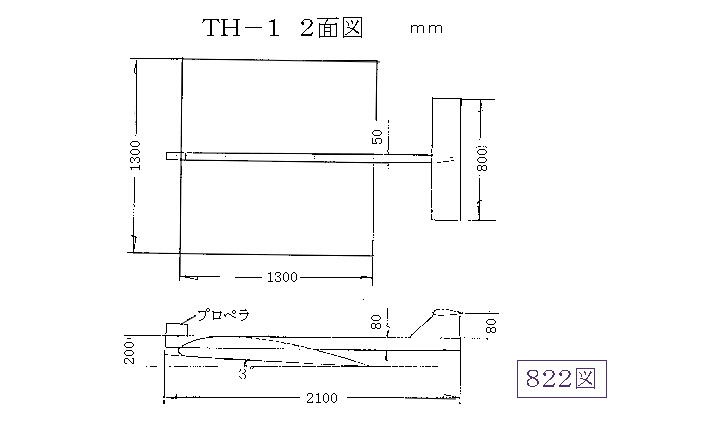
作られた全機模型の諸元が821図です。重量は4.9 kgになりました。2面図が822図です。色々な角度から撮られた写真が823〜826図です。825図は尾翼部の拡大写真で、迎角を変える機構がよく分かります。826図は台車に乗って出発する写真です。




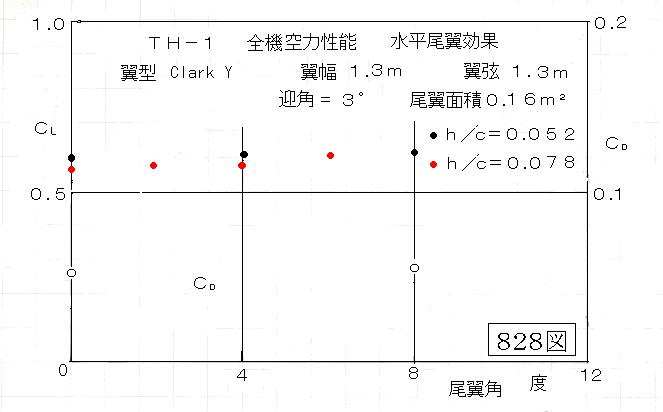
先ず全機に働らく空気力が測定されました。プロペラは止めてあります。その結果が827図に示されています。
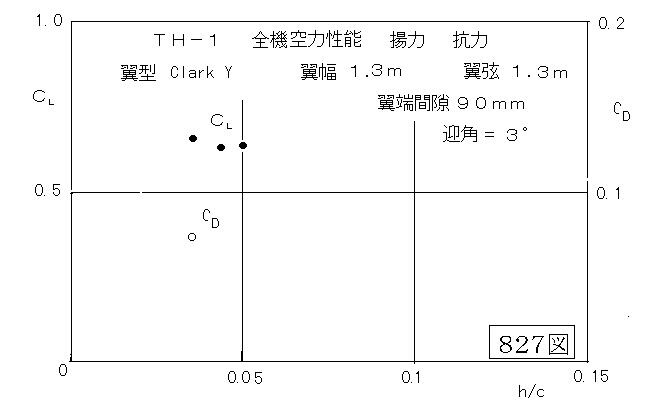
単独翼の時と比べると揚力係数はほとんど違いませんが、抗力の方は1.5倍くらいになっています。これは胴体やプロペラや尾翼の抗力が付け加わっているからです。地面からの高さによる地面効果もはっきりと分かります。揚力と抗力との比は10よりやや小さいようです。これから飛行時の抗力を見積もるとほぼ5 Nになり、現在のプロペラでは等速飛行は難しいことになります。
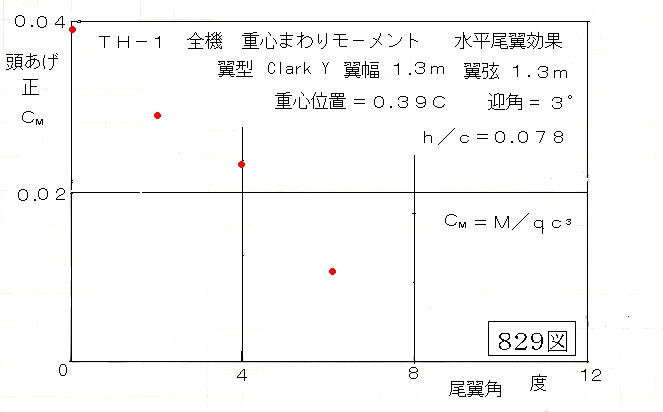
水平尾翼の迎角を変えたときの揚力と抗力の変化が828図に示されています。迎角が増えるにつれて全体の揚力(第1揚力と第2揚力の和)が少し増えています。抗力についてははっきりしませんが、あまり大きな変化はありません。もっと重要なのは縦揺れモ−メントです。829図には重心回りのモ−メント係数が示されています。重心は翼弦のほぼ36%にあります。当然のことですが、迎角が増えるとモ−メントはだんだん頭下げの方向に向かいます。
この模型はほとんど胴体の無い平たい平面形なので、飛びひらめ(TH−1)と名付けられました。
8.3 TH−1飛行実験
飛行を制御するハ−ドウエアはプロペラと水平尾翼です。それらをコンピュ−タ−からの指令で制御します。普通の模型飛行機の無線制御系に回路を加えてパソコンで制御指令を送れるようにしました。模型を乗せた台車をコンピュ−タ−制御で加速します。 カタパルトの役をする台車が最高速度になった時にプロペラを回せという指令が出されて台車は減速を始め、模型は台車から離陸します。最高速度は8.8〜9.2 m/sにとりました。離陸は出発してからほぼ 25 mの地点で、そこから20 mほどが飛行の範囲です。加速区間での台車上の模型の翼の迎角が重要です。主翼は胴体を水平にした時に迎角が3゜になるようにセットしてあり、その迎角で揚力と重力が釣り合うような速度を選んでありますが、台車の上でその角度にすると、最高速度になる前に離陸してしまう可能性があります。そこで我々は台車の上での翼の迎角を1.6゜にとりました。それとともに尾翼の迎え角を大きくして(8゜)頭下げのモ−メントを与えておきます。離陸と同時に尾翼角を2゜にします。これで頭を上げてほぼ水平に離陸します。それからほぼ2 mおきに尾翼角が制御できるようなプログラムにしてあります。
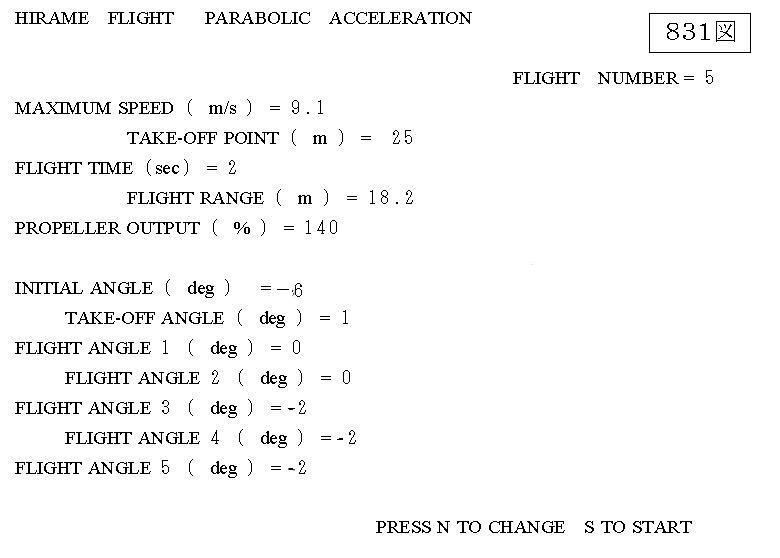
831図はプログラムされたコンピュ−タ−の画面です。FLIGHT ANGLEというのは水平尾翼の迎角で、離陸(TAKE OFF)から尾翼角の細かな制御が見られます。それを色々に変えて良い条件を見つけます。飛行の縦安定はタンデム翼の場合は地面効果によって強い安定が得られますが、このTH−1ではそれがありません。水平尾翼の効果は自然の靜安定を保つよりも、迎角の制御によって設計された飛行経路を描くようにするのですから、安定度という考え方よりも、操縦性を重視する形になっています。
飛行中に頭が下がって沈降してきたきたとき、頭を上げるモ−メントを得るためには尾翼の揚力を減らすか、場合によっては負揚力を与えるしかありません。しかしそうすると全体の揚力が減ってますます沈下します。自由空間での飛行には少々の沈下は問題になりませんが、トンネルの中ではそれは許されません。これが水平尾翼による姿勢制御の限界です。
プロペラの出力を最大にして、尾翼角のプログラムをいろいろに変えて自由飛行を繰り返しました。そしてトンネルの横からビデオ撮影をしました。
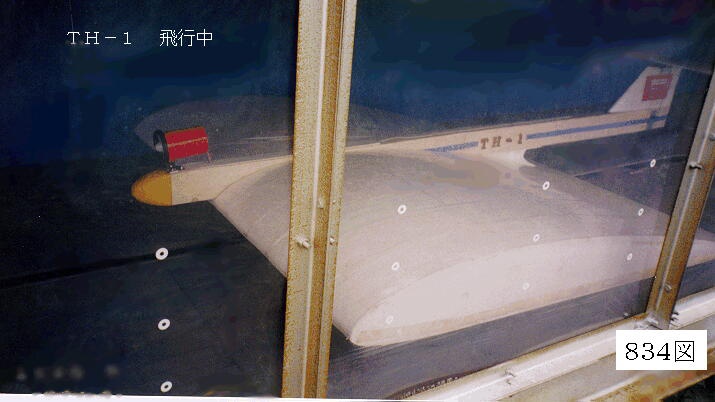
832〜834図はその例です。トンネルの窓には高さを示す印が一面に貼ってありますから、それと機体の画像とを比べて飛行高度と速度を推定することができます。835図は飛行を正面から撮ったものです。833図のような写真を解析すると836図のような飛翔軌跡を描くことができます。飛び出す高さを2種類に変えてみましたがその影響はあまりありません。



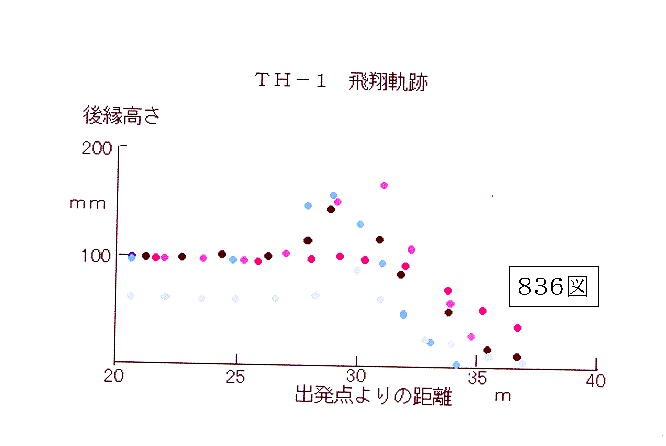
飛び方は3つのパタンに分類できます。一つは離陸してまもなく落下して着地します。もう一つは迎え角がどんどんと増えて失速して舞い上がり、天井に接触します。三つ目が少し高く浮いた後で地面近くを滑走するという理想的な飛行です。これらはすべて尾翼角をどのように制御するかによってきまります。
測定によると揚力の着力点は重心の前方にあります。尾翼の迎角を増やすことで頭を下げ、減らすことで頭を上げることができます。プログラムした迎角条件に応じて色々な飛行をします。再現性は100%ではありませんが、尾翼の迎角を1゜変えてもかなり違った飛行をします。理想的飛行の条件を見つけるためには数多くの飛行を繰り返す必要がありました。離陸して少し高度を上げてから、滑るようなプログラムがもっとも望ましいことが分かりました。一度頭が下がると、それを回復するために尾翼角を減らすと全体の揚力が減少してますます高度が下がることになります。
舞い上がり(失速)のときを除いては飛行中に翼端が側壁に接触することは殆どありません。翼端間隔が僅か10 cmで、飛行距離が10 mを越えることを考えるとこれは驚異です。その理由としてはどちらかの翼端が側壁に近付いたとき、その部分で翼端からの吹き上がりの流れが阻害されて、揚力が増えて翼端が上にあがり、傾いた機体は横に滑って、機体を壁から引き離すような力が働くためと思われます。勿論、実際の飛行機では細かい制御が必要ですが、地中飛行機の最大の問題点である側壁との接触を避けることはそれほど難しくはないようです。
小さなトンネルの中を飛ぶアスペクト比が1の模型飛行機はほぼ満足すべき性能を示しました。121図のような翼内客室という飛行機の可能性は実証されました。先に実験されたタンデム翼のTM−4と比べると、安定に飛行するのはタンデムの方ですが、適当な制御によってTH−1も好ましい飛行をします。実際の飛行は何重にも安全性が確保された制御飛行ですから、自然の靜安定の比重はそれほど高くはありません。この点からもひらめ型が劣っているとは言えません。
8.4 TH−2模型
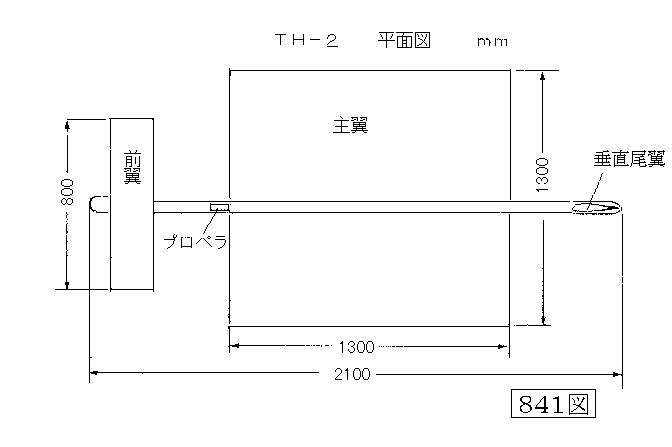
制御できる水平尾翼を持つTH−1には頭を上げるために尾翼角を負にすると全体の揚力が減って、かえって沈降を早くするという矛盾がありました。このことは自由空間飛行ではごく当然で、さしたる障害ではありませんが、地中飛行機では重大な問題です。もし前方に水平翼があれば、その揚力を増やすことによって、全体の揚力をふやし、また頭を上げることが出きるはずです。この考え方でTH−2が設計、製作されました。
しかしこの設計には基本的な困難があります。例えば頭が上がったときには前翼の迎え角が増えて揚力が増え、また頭が上がります。完全なピッチ不安定です。頭が下がったときも同じことです。これをまともに飛ばすには適切な操縦が必要です。もし飛行機の位置や姿勢についての情報が的確に入手できれば、この操縦は難しくはありませんが、現在の所それは望めません。製作された模型はTH−1を改造したものです。841図は設計図です。842~845図はいろいろな角度からの写真です。
模型を3分力天秤に載せて、走行実験によって空力特性を測りました。
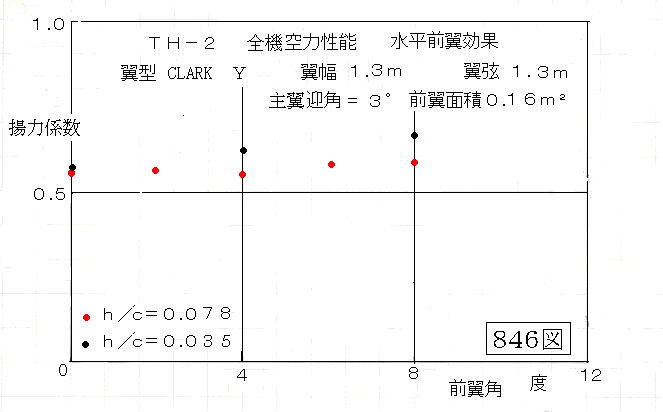
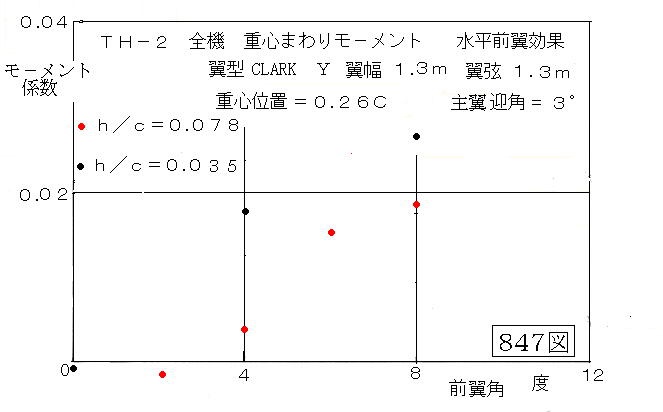
床面からの高さを一定にして前翼角を変化したときの揚力係数が846図に示されています。前翼角が増えると揚力係数も僅かに増えます。同じくピッチングモ−メントに及ぼす前翼の効果が847図です。モ−メント係数は重心まわりです。迎角によってモ−メントが負から正に変化するのがはっきりと分かります。




8.5 TH−2飛行実験
本質的に縦の安定を持たないTH−2をまっすぐに飛ばすための制御は簡単ではありません。まず加速している台車の上では前翼の迎え角をマイナスとして頭を抑えます。台車が最高速度になったときにプロペラのスタ−ト指令を出し、同時に前翼の角度をプラスにして頭を上げます。あとはプログラムによってほぼ4 mおきに前翼の角度を指定して水平飛行をするようにします。前翼を支えている柱が垂直翼として働き、この重心より前にある垂直翼は方向不安定の原因となります。前翼も垂直尾翼も上に突き出しているので、床から5 cm上で、天井から5 cm下の空間をほぼ水平に30 mほど飛ぶことはきわどい仕事です。いろいろなプログラム飛行が試みられました。851図は模型が落下したところ、852図は飛び上がりすぎて天井に接触したところ、853図はほぼ理想的な飛行をしているところです。
TMシリ−スに比べると方向安定が十分でなく、ときどき側壁に接触することがあります。これは先に述べた側壁の安定効果がうまく働かないからと考えられます。縦の安定が無いこととも関係しているでしょう。
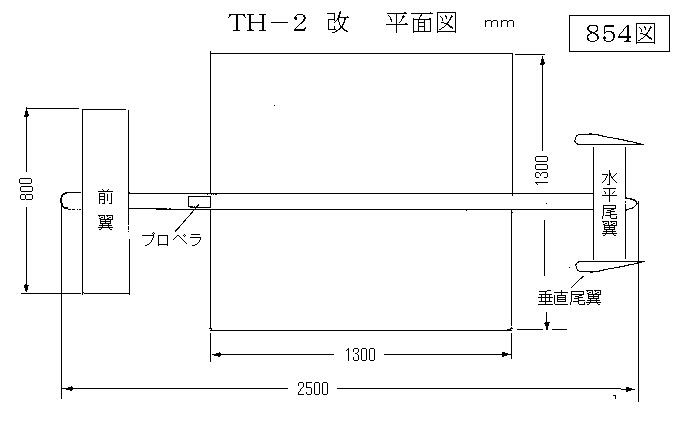
方向安定があまりにも悪いので垂直尾翼の面積を増やしました。854図が改良されたTH−2の2面図です。縦の安定を増やすために新設された水平尾翼が二枚の垂直尾翼を支えています。この模型で飛行実験が行われました。すこし安定度が上がったようですが、それを数量的に表現することはできませんでした。
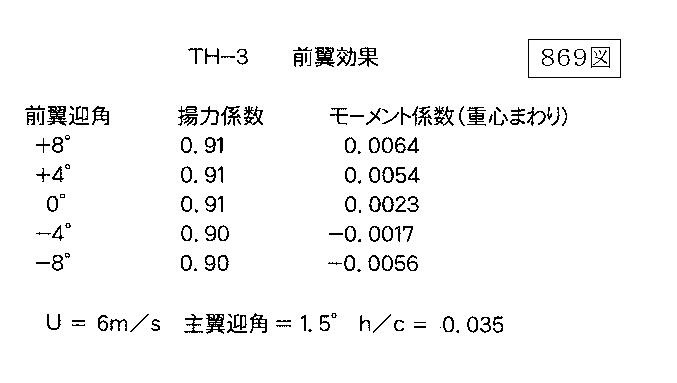
8.6 TH−3模型
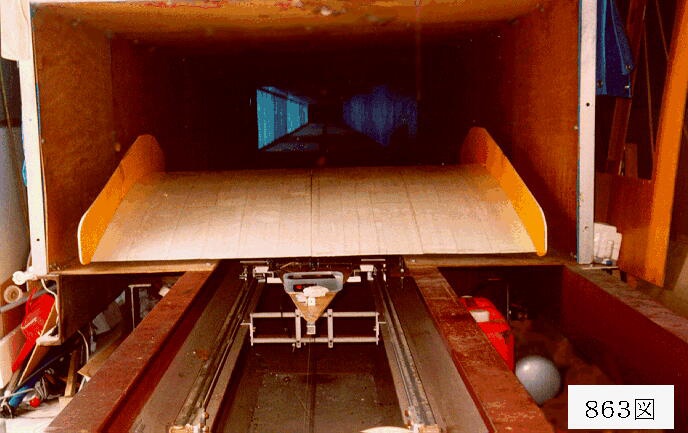
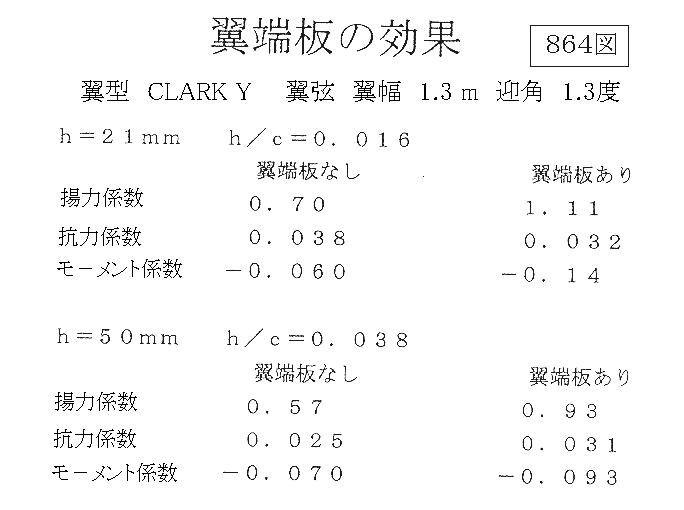
TH−2の翼端に翼端板を付けることによって実効的なアスペクト比を大きくすると、揚力対抗力比を改善できることが期待されます。まず単独翼に翼端板をとりつけて、走行実験で空気力を測定しました。翼端板は表面処理をした5 mm厚さの発泡スチロ−ルです。861図は翼端板の略図です。端板は全面的に翼端を被っています。862図の黄色い部分が端板です。863図は天秤の上に乗って、今から出発しようというところです。地面からの高さを2種類に変えたときの結果を864図に示しました。翼端板の効果は予想以上です。揚力の増加は60%にも達しています。抗力の減少はさほどでもありまっせんが、これは翼端板自身の抗力が加わるからでしょう。
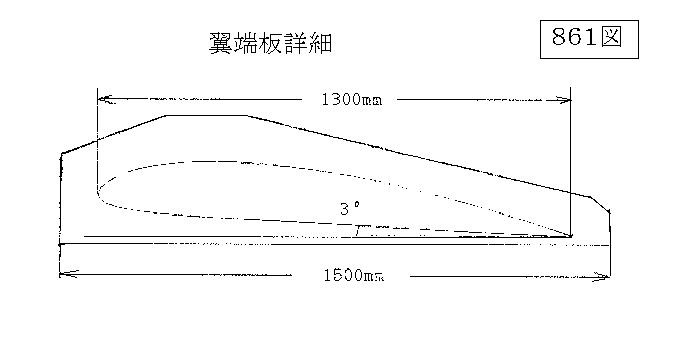

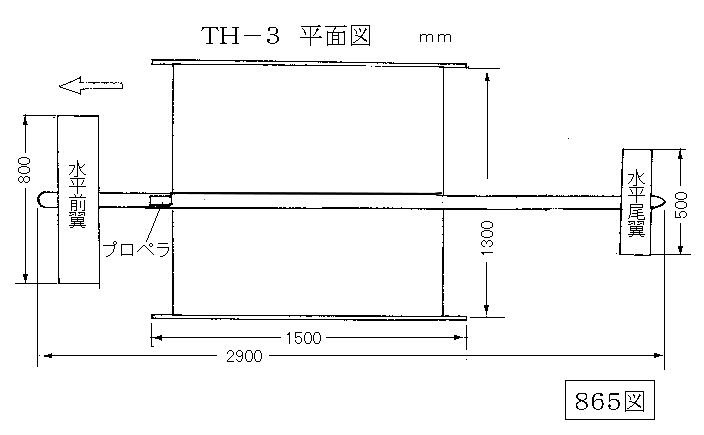
この翼端板のついた模型をTH−3(飛びひらめ−3)と名付けました。 865図は模型の平面図です。水平前翼の迎角を調節することによって上昇、下降の操縦をします。プラスの縦安定を確保するためには水平尾翼が必要です。垂直尾翼は要りません。それは翼端板が大きな垂直尾翼の働きをするからです。
866~868図はいろいろな方向から撮られたTH−3の写真です。この翼端板の付加で重量が6.4 kgまでに増えましたが、揚力係数の増加でかえって低速でも浮上することになりました。
水平前翼の操作による揚力の変化が869図です。第1揚力と第2揚力の変化がはっきりと出ています。水平前翼の操作によって頭を上げたり下げたりできることが分かります。



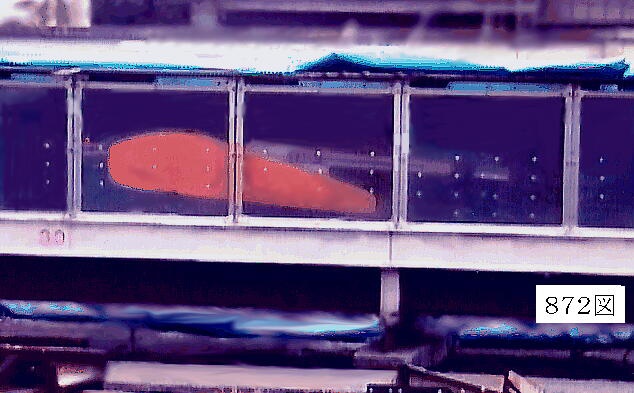
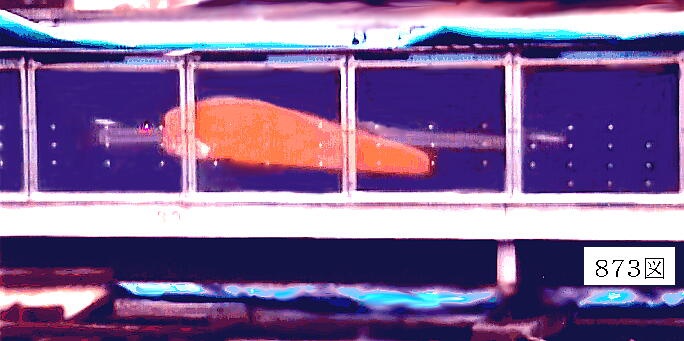
8.7 TH−3飛行実験
水平前翼とプロペラのプログラムされた操作によって自由飛行を試みました。揚力が増えましたから、翼端板という重量の増加にもかかわらず、8.3 m/sあたりで離陸します。加速しているとき、台車上では前翼の迎角を−6゜にして頭を押さえます。台車が最高速度に達したとき、前翼迎角を0゜にし、プロペラを回して離陸します。このあたりの操作はTH−2と同じです。面積の大きい水平尾翼の存在にもかかわらず縦安定があまりよくありません。前翼による操縦は微妙で、少しの違いで失速して舞い上がったり、どすんと落下したりします。結論としては、この種の飛行機では姿勢と位置の検出が必須で、プログラムだけの飛行ではよほど好い条件でないと安定飛行はできないということです。871~873図は横から撮った比較的良好な飛行の写真です。これらはビデオテイプからの再生ですので、少しぼやけています。871図はやや低空飛行で、872図はすこし高く飛びすぎています。翼端板前方の胴体上の赤い小さな光はプロペラが作動している事を示しています。873図は高さも、迎角も適当な理想的な飛行です。

874図は正面から撮った写真で、ほぼ理想的な飛行の場合です。

このTHシリ−スの模型による安定飛行はかなりきわどく、模型の位置や姿勢を正確に検知して、それに応じた的確な制御が必須であることを示しています。それが実現すれば、この種の地中飛行機の可能性は十分にあります。
このシリ−スの実験後再びタンデム翼の実験に帰りました。TM−5です。
入間での実験は2000年2月20日をもって終了しました。始めてから約7年が経過しました。その間、夏と冬の休暇を除いて、ほぼ週一回の頻度で、全体として300日ほどの実験が繰り返されました。
実験は数多くの人々の協力で行われました。特に実験装置の設計に貢献された清水哲夫、模型の制作を担当された吉田周明、実験の遂行に絶えざる助力を与えられた中村宏、安藤博、斎藤博之助、飯田敏岳の諸氏に深く感謝します。
9.将来計画
9.1 まとめ
地中飛行機のアイディアが出現したのは1992年のことですから、10年近くが経ちました。そのとき発足した地中飛行機研究会は地域的には日本中を縦断し、専門としては技術のあらゆる分野だけでなく、経済の専門家までも網羅しました。すべての分野で実績が上がったとは言えませんが、本質的な部分では可成りの進歩があり、地中飛行機の実現の可能性は示されたと思います。
まず地中飛行機のいくつかの設計例が示されました。それらは将来の本格的な設計の基礎になるでしょう。風洞実験では測定部の境界層の吸い込みが適当に行われるならば、風洞実験の結果と飛行実験の結果と大きくは違わないことが分かりました。地中飛行機に最適な翼型、翼平面形などは風洞実験で調べることが出来るでしょう。
入間での模型実験の結果をまとめてみましょう。色々な形式の飛行機が試されました。評点をつけると、前後二枚主翼のタンデム型の優位は動きません。TM−4(741図)とTM−5(762図)です。前後小翼のTM−6はあまり感心しませんが、両方の小翼を地面に近づけたTM−6改(781図)はずっと安定な飛行を見せました。小型トンネルを対象とするヒラメ型のなかでは水平前翼と翼端板を付けたTH−3(865図)が出色です。
9.2 将来計画
将来の計画として深地下の利用と、その一部としての地中飛行機の開発は次のような手順を踏めばよいでしょう。
いろいろな設計の地中飛行機模型がテストされましたが、小型模型によるプログラム飛行には限界があります。トンネルの中のちょっとした風で大きな影響を受けて再現性のある実験ができません。またプログラム飛行だけではなく、飛行中の姿勢と位置とを測定して、そのデ−タを利用して実時間で能動的な操縦を行う必要があります。しかし今の大きさの模型ではセンサ−を積み込むことは不可能です。
もう一回り大きい中型模型の実験が次の計画です。現在の模型のスケイルを2倍、質量を10倍、速度を2倍くらいにふやした実験を計画します。実験トンネルの長さは200 mぐらいでしょう。この模型の質量は40 kgほどで、ペイロ−ドは10 kg以上ですから、いろいろなセンサ−や小型コンピュ−タ−を積み込むことができ、ほとんど自力で確実な飛行をすることができるでしょう。センサ−から得られた位置、姿勢、速度の情報をもとにして、操縦の指令を発信します。この仕事は資金量として数億円でしょう。
その次には100億円程度のもう一回り規模の大きい模型の実験です。
9.3 深地下利用
私は基本的には大都市の高層化には反対です。空の見えない都市、ビルの谷間を吹き抜ける風ぐらい味気無いものはありません。高架の高速道路も醜悪です。道路の下での生活は惨めです。ビルを高くする代わりに地下に入って行くべきです。また高速道路も、郊外電鉄も地下にもぐるべきです。地中飛行機の実現を含んで、将来の大規模な深地下利用の国家的プロジェクトとして次のようなものが考えられます。
深地下は無限の可能性を秘めた未来の空間です。その空間には三つの機能があります。備蓄、流通、生産です。構想はいくらでも広がりますが、そのために必要な技術的発展の骨組みは次のようです。
まず深地下空間の地震に対する安全性を検討します。地下の安全性については色々な説がありますが、徹底的に調べる必要があります。地震で壊滅するようなら深地下は使い物になりません。色々な地質について、大きいトンネルや、小さいトンネルを掘って安全性の研究を進めます。それによって深地下開発に適当な場所と、不適当な場所とがはっきりするでしょう。弱い地震が屡々起きる我が国ではこの種の実験は容易です。また直上のビルに対する影響を調べます。
地下で発生する大気汚染物質の処理技術が発展される必要があります。扱いやすくて、経済的な技術を確立しなければなりません。また騒音を積極的に抑制する技術も重要です。
輸入に頼っているエネルギ−源、即ち石油、天然ガス、水素などの地下備蓄は重要です。地下はゲリラなどの攻撃に対しても安全です。また深地下では温度がほぼ一定してることを利用すれば食料、医薬品、衣料、日用品などの備蓄が可能です。
トンネルを使っての人々の移動と、エネルギ−、物資、情報などの輸送について、国としての総合的な政策を策定しなければなりません。それをもとにして、大小色々なトンネルによって全国的な交通輸送網の設計と着工が可能になります。適切に設計されるならば地下ではほとんど交通事故はありません。安全な輸送が保証されます。
次は生産基地としての深地下です。危険性がゼロとは言えない原子力発電所や、化学プラントなどをどのようにすれば深地下に移すことができるかをを検討します。すべてを遠隔操作にして、事故の発生した時には迅速な閉鎖を行うようにします。住宅を地中に移すと言うアイディアもありますが、私はそれに賛成できません。やはり毎日の生活は自然の陽光と、爽やかな自然の風の中で営まるべきでしょう。
このような計画は民間や、市場に任しておくことは出来ません。少なくとも深地下利用の初期には政府主導のもとに秩序立った研究を進めることが要望されます。
10 むすび
将来、これらの深地下開発計画が実現するかどうかは人々の要望の強さや、政治家の決断にかかっています。地中を飛ぶ飛行機だけでなく、環境を破壊する生産設備、輸送機関、高速道路などの、危険なものをすべて深い地下に移して、地上を安全で、陽光の溢れる、緑豊かな楽園にするという壮大な構想は何十年、あるいは百年を超えるような年月の仕事です。そして私達はその構想が世代を越えて引き継がれ、21世紀か、22世紀には必ず実現すると信じています。
研究成果の海外での発表:
International Symposium on Aeronautical Science and Technology
1996.6 Jakarta, INDONESIA
Eighth Asian Fluid Mechanics Conference 1999.12 Shenzen, CHINA
謝辞:
仕事の初期に入間の模型トンネルの建設をはじめとして、種々の精神的、経済的な支援を与えられた株式会社フジタに感謝します。また後期にこの仕事を経済的に支えていただいた本田工業株式会社にも深い謝意を表します。
参考文献
(1) 地中飛行機研究会報告 No 1(1996)地中飛行機計画
(2) 地中飛行機研究会報告 No 2(1996)地中飛行機の経済、経営的問題について
(3) 地中飛行機研究会報告 No 3(1996)地中飛行機の設計
(4) 地中飛行機研究会報告 No 4(1996)地中飛行機模型飛行実験総括報告
(5) 地中飛行機研究会報告 No 5(1996)入間飛行実験設備
(6) 地中飛行機研究会報告 No 6(1996)地中飛行機の風洞実験
(7) 地中飛行機研究会報告 No 7 (1996) 単独翼の3分力測定
(8) 地中飛行機研究会報告 No 8(1996)TM−3 3分力測定
(9) 地中飛行機研究会報告 No 9(1996)TM−3 飛行実験
(10)田中航二、石田信博:地中飛行機の経営上の諸問題 大阪商業大学論集 第99号 p66(平成6年6月)
(11)田中航二、石田信博:地中飛行機計画のもつ多機能性について 大阪商業大学論集 第107号 p115(平成9年1月)
(12)航空宇宙技術研究所、株式会社フジタ 共同研究成果報告書 二次元翼の地面効果に関する共同研究 (1995)
(13)安部建一、内田卓秀:地中飛行機の空力特性に関する研究(1996.10)
(14)Silverstein, A.: NACA Rep 502 (1934)
(15)Carter, A.W.: NASA TN D-970 (1962)
(16)都丸祐司、小濱泰昭:翼型の地面効果特性に関する実験的研究 ながれ 10巻 p 47 (1991)
(17)新田恭子:地面効果を受ける2次元翼の風洞試験及び数値計算,日本航空宇宙学会誌 43巻502号(1995)