|
Development of a buried object exploration system by crossed sensor array
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
Introduction
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
Previously the author developed a sensor array exploration system for the buried objects in the underground1). That is as follows. A transmitting line array is put on the ground surface. In this state, maximum directivity level of the array is formed to the broad side direction. And the sensor line array is put on the ground surface which includes the plane this maximum level specifies. Consequently, the sensor line array is vertical to the transmitting line array. After using received data , beam forming is performed to the underground. By this method, since the point in which both the transmitting beam and the sensor beam indicate maximum becomes most sensitive, only a reflection information as to one point of a plane on which image is reconstructed can be obtained uniquely. From the experiments, reconstructed image of a plane was found to be very satisfactory. However, by this method, to obtain three-dimensional image of underground, both the transmitting array and the sensor array have to be moved together. So, the explorative operation becomes burdensome. In this report, a new three-dimensional exploration system composed of movable transmitter and the crossed sensor array placed on the ground will be suggested. As for this method, since the sensor array is fixed, explorative operation will be improved. Only a transmitter has to be moved but it’s not necessary to move it many times.
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
Characteristics
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
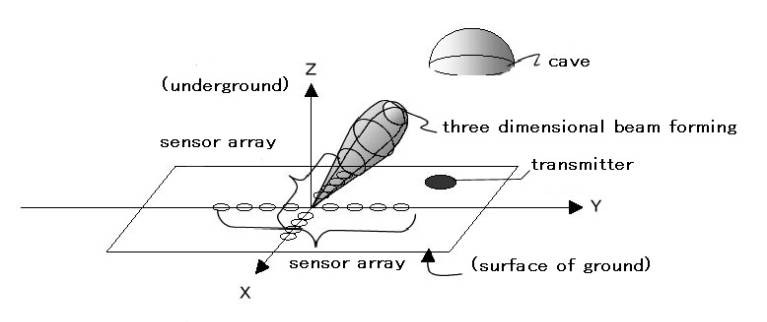
Configuration of three-dimensional beam forming by the crossed sensor array is shown in Fig.1. Here, the three-dimensional beam forming is performed to arbitrary point of the space of underground. (To the contrary, previously developed, two-dimensional beam forming was performed to the arbitrary point of one plane to be explored.) In Fig.1, for the purpose of explanation, ground surface was drawn at the lower part and underground was drawn at the upper part.
Signal & Processing
・From a transmitter, broadband and omni-directional acoustic signal is emanated.
⇒Acoustic wave is emanated to whole under ground ⇒In underground, reflective wave is generated in the arbitrary direction . ⇒On account of broadband acoustic signal, broadband reflection is obtained . Thus, reconstruction image has the range resolution.
・Beam forming by the crossed sensor array
⇒By this beam forming, reflection information which corresponds to the arbitrary direction in underground is obtained. ⇒By software, since beam forming is performed to the arbitrary point of three-dimensional space, It’s possible to obtain reconstruction image of a cave or a buried target as continuous objects.
Moreover, in comparison with the rectangular array, the crossed sensor array consists of small number of sensors. So cost performance in hardware is realized.
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
Fig.1 Configuration of three-dimensional beam forming by the crossed sensor array
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
Simulation examples
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
In Fig.2, underground, a cave model as a target, acoustic source(transmitter), and the sensor array to be used for simulation are shown.Even if the ground is saturated by water or unsaturated, longitudinal wave and transverse wave are considered in it.As shown in figure, coordinate system XYZ is defined, and the linear arrays are put on X- axis and Y-axis. The number of sensors of each array is N. A transmitter emanates omni-directional broadband sound, and here , for example, is put on the origin of XY coordinate system. The cave is modeled by the dome partially consists of sphere whose center is on the coordinate (Xs, Ys, Zs). Moreover, Multiple Mutipole Expansions2) is here used for a simulation.Simulation process is given as follows,
Simulation process
1) Some virtual multipole wave sources are put as in Fig.2. Where, to all direction on each multipole,virtual multipole wave sources indicate the wave that had various kind of phase and amplitude. Hence, wave diffraction is strictly expressed. Those phase and amplitude are the unknown parameters.
2) Determination of unknown parameters of virtual multipole sources From the known data of wave that transmitter emanates and boundary conditions of the ground structure ,that is, shapes of cave and layers and their physical data, unknown parameters are determined.
3) Calculation of received data of sensor array Received data are calculated at the position of sensor array where the group of elastic wave of multipole sources with unknown parameters determined. In this state, neither positions nor shapes of caves can be known. It is merely that the reflective wave of the ground structure was received at the sensor array. Cross-sectional image of the ground structure is never obtained without beam forming .
4) Reconstruction of cross section image of ground structure After beam forming, cross section image of ground structure is obtained.
These sequential simulations were carried out as follows.
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
Fig.2 underground, a cave model as a target, acoustic source (transmitter), and sensor arrays
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
Simulation terms are given in Table1. Higher cut-off frequency of transmitter was selected as 1KHz.The number N of sensor of the array was selected as 32. Here ,in case the center of cave is in Z-axis, 1) reconstruction image as to the cave scale was investigated, and 2) three-dimensional reconstruction images were investigated. |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
Table.1 simulation parameter
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
1)reconstruction image as to cave scale
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
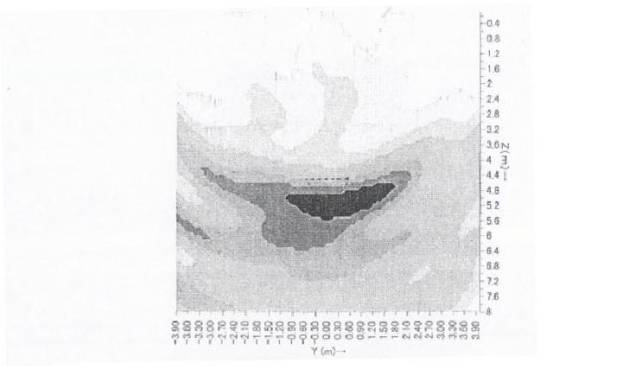
Reconstruction image of YZ plane is shown in Fig.3. Horizontal axis is Y and vertical axis is Z . The cave has 1m aperture ,and is 40cm in depth. Image is shown in the range of -4m < Y < 4m and 0 < Z < 8m . Intensity of reconstruction image was digitalized into 8 grade scales. Where, intensity 0 was indicated as white, and max intensity was indicated as black.
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
Fig.3 Reconstruction image in YZ plane The cave has 1m aperture and is 40cm in depth. Center of cave(Xs,Ys,Zs)=(0,0,4.4m)
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
From Fig.3,image is found to be reconstructed at nearly actual object position. As for the cave whose aperture is 70cm smaller than 1m and that depth is 20cm shallower than 40cm, reconstruction image in YZ plane is shown in Fig.4. |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
Fig.4 Reconstruction image in YZ The cave has 70cm aperture and is 20cm in depth. Center of cave(Xs,Ys,Zs)=(0,0,4.3m)
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
From Fig.4,in case of small cave, it’s found that the range resolution is lower ,and that image was reconstructed at deeper position Z=5.6m . The smaller the object as a reflecter is, the larger the error of reconstruction might be . So in general, the object is possibly reconstructed at the shallower position than the actual.The error, however, is in the range of theoretical resolution ,and is within the wavelength 1.5m of higher cut-off frequency.
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
2)Three-dimensional image reconstruction
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
Horizontal cross section image of the cave ,where aperture is 70cm and depth is 20cm, was obtained.That image is shown in Fig.5 ,where horizontal axis is X and vertical axis is Y . Reconstructed image was indicated in the range : 4m<X<4m ,-4m<Y<4m . |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Fig.5 Horizontal cross section image to the caveThe cave has 70cm aperture and is 20cm in depth .Center of cave(Xs,Ys,Zs)=(0,0,4.3m)
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
The deeper the reconstruction plane is , the darker the circular image appears from Fig.5. And then the weaker small image appears and lastly disappears . From this, target like bowl is recognized. Aperture of cave is 0.47 times smaller than the wavelength of higher cut-off frequency, or depth of cave is 0.13 times smaller than that. But ,that is recognized as a target.
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Conclusion
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
By using a movable transmitter and fixed crossed sensor array on the ground surface, a new three-dimensional exploration method was suggested. Then simulation was carried out to explore the cave in the underground.From results, in spite of lower range resolution ,it was found that three-dimensional recognition of cave was possible in the range of wave length of higher cut-off frequency. By this system, once transmitter emanating broadband acoustic signal, arbitrary Cross section of space image is obtained with software. Hence, this system seems to have a merit of reducing explorative operation.
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||
References
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
1)Topics4,”Development of the buried objects exploration system by the array signal processing”,(’01.8.21) 2)M.G.Imhof,“Multiple multipole expansions for acoustic scattering,”J.Acoust.Soc.Am97(2),p754-763(1995) |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||